
Next Gen Military Vehicles: Modular and Autonomous
The fleet of next generation military ground vehicles will be modular, capable of swapping out different components and share them across vehicles. The modularity will allow the fleet to be much harder to predict and meet the adversary in the field with the greatest flexibility and adaptability. The Automotive Research Center (ARC) research team is also providing vehicles with the autonomy to regroup and address challenges on the fly during operations.
When in the field, military vehicles encounter many different situations. An intelligent adversary adds a layer of complexity that heightens the uncertainty. Bogdan Epureanu, Director of the ARC and the Arthur F. Thurnau Professor of Mechanical Engineering at the University of Michigan, and his team are designing the vehicles and developing the algorithms to create the vehicles of the future to meet the needs of this moment. This process, however, is a little like the chicken and the egg paradox.
“We are designing simultaneously the vehicle and the algorithms that operate it,” said Epureanu. “We can’t just say design the vehicle with a priori operational specifications, but we have to create the operational specifications also, which depend on the capabilities the vehicle design enables.”
The team is designing vehicles that can be quickly assembled and disassembled using modular units. According to Epureanu, modularity is important because it provides vehicles the ability to combine in different ways to leverage different functionalities. They are also developing Artificial Intelligence (AI) algorithms to help the vehicles assess the situation to decide which components to swap in and out in the field to adapt to unknown situations. In particular, the algorithms can quickly evaluate the countless permutations that result from multiple modules in a fleet of hundreds of vehicles to identify the best solution on the fly.
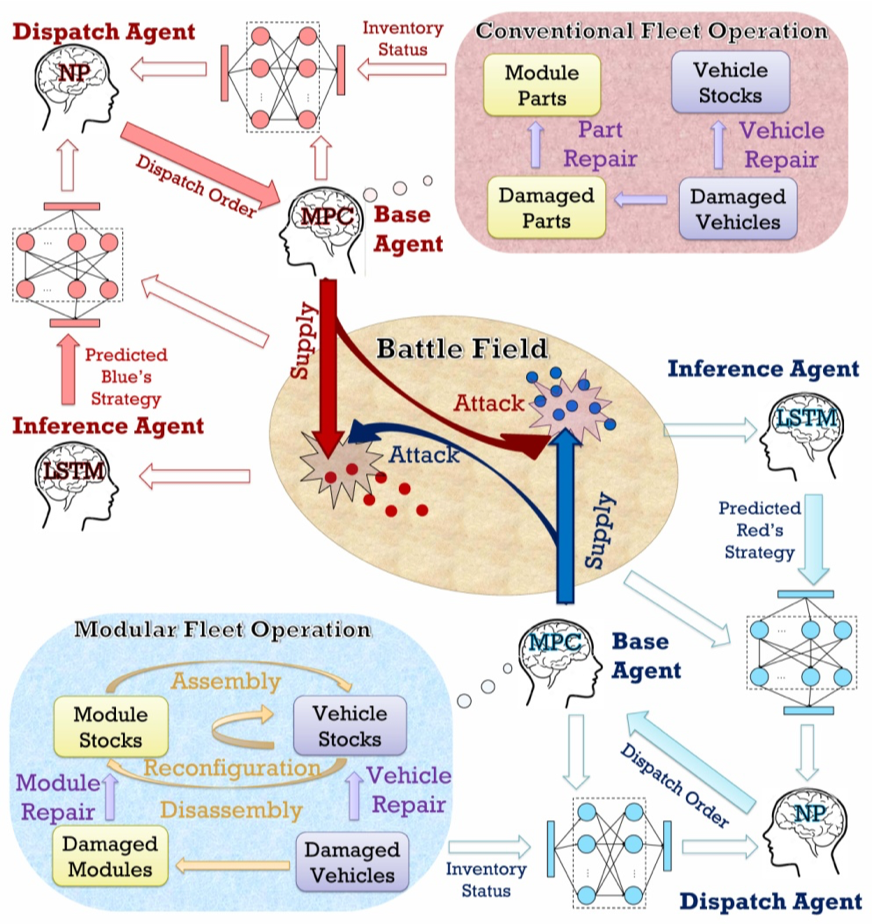
To test their algorithms, they used an attacker-defender model to simulate an encounter between a modular fleet of vehicles against a conventional force. During the simulations, equity between the two fleets is established by providing the conventional force the same level of intelligence and access to the AI algorithms. As the two forces engage, the researchers evaluate the ‘win’ rates to determine which modular concepts and vehicle designs proved to be most advantageous in different scenarios.
“There is no perfect solution, but we are trying to strike a balance to get the modular setting that fits the widest number of environments,” said Epureanu. “The most important element of autonomous vehicles is to project a force over long distances so you do not need humans where things are dangerous.”
The strength of this project lies in not only the modularity but also the autonomy of the vehicles. The team is developing algorithms to help the vehicles re-evaluate their circumstances and reform teams to address the challenges encountered on the field. This includes structural adaptation through modularity and communication and adaptive learning to satisfy demands to engage the adversary.
“This is about dynamic teaming of autonomous modular vehicles,” said Epureanu. “If we are acting against an intelligent adversary, we need to be less predictable and use autonomous teams in different ways to accomplish the task.”
According to Epureanu, this approach has commercial applications. He images the fleet could be delivered to construction zones and in disaster relief operations where operation in unstructured, unknown, and dynamic environments is very challenging. The modular and autonomous vehicles could reconfigure to complete different tasks.
“What works is a strategy where teams collaborate and redistribute their resources to accomplish the overall goal,” said Epureanu. “Truly dynamic teaming allows vehicles to cooperate.”
Epureanu is joined by Panos Papalambros and Yanchao Tan at UMich, Matthew Castanier, Jonathon Smereka and Nicholas Krupansky at the U.S. Army GVSC, Ra’ed Seifeldin at the Office of Naval Research, and Xingyu Li at Ford Motor Company and Mainak Mitra at Ansys on two projects titled “AI-Based Attacker-Defender Dynamics of Adaptable Fleets of Autonomous Vehicles” (project concluded) and “Dynamic Teaming of Autonomous Vehicles to Address Intelligent Adversarial Actions.”
Stacy W. Kish