
Systems of Systems & Integration
Annual PlanAI-Based Attacker-Defender Dynamics of Adaptable Fleets of Autonomous Vehicles
Project Team
Principal Investigator
Bogdan Epureanu, University of Michigan Panos Y. Papalambros, University of MichiganGovernment
Matthew Castanier, Richard Gerth, U.S. Army GVSC
Ra’ed Seifeldin, Office of Naval Research
Industry
Edward Umpfenbach, General Motors
Student
Xingyu Li, University of Michigan
Project Summary
Projected started in 2017 and was completed in 2020.
The main goal of this project is to develop a new methodology to model and analyze the synergies between autonomy and modularity, with a focus on the dynamic behavior of fleet systems composed of teams of manned-autonomous modules and modular vehicles, and to determine possible ways to improve the overall system dynamics in terms of collaboration, negotiation, and competition.
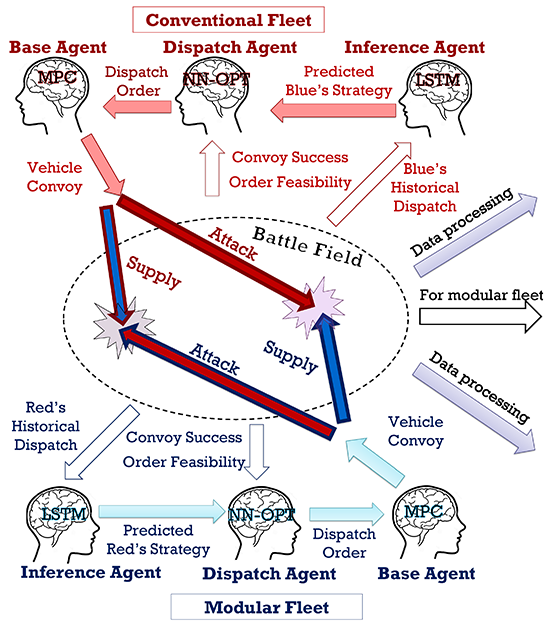
Autonomy can be combined with modularity to improve overall fleet mission performance. Autonomy has commonly perceived as a driverless operation. We extend this vision to include automated assembly, disassembly and reconfiguration (ADR) in addition to the driverless operation for modular fleet systems. A conventional (non-modular) fleet in this vision is a special case with a single module and no ADR capability. Shared resources (vehicle and modules) and mission objectives make the collaboration and negotiation a key element for successful dynamic fleet operation in a competitive mission environment.
For a given fleet of autonomous modules and vehicles dynamically organized in manned-autonomous teams, the specific questions we aim to answer are: (1) If a limited investment that can change fleet dynamics is to be made in order to improve the fleet system, what is the best high-level investment decision that maximizes the overall performance gain? (2) What is the best control strategy to manage inventory, maintenance, assembly, and resupply operations in order to maximize the performance of the fleet given its dynamic properties?
Publications
- Li X., Epureanu B. I., “Analysis of Fleet Modularity in an Artificial Intelligence-Based Attacker-Defender Game.” European Journal of Operations Research, 2019 (submitted).
- Li X., Epureanu B. I., “An Agent-based Approach for Optimizing Modular Vehicle Fleet Operation.” International Journal of Production Economics, 2019 (submitted).
- Bayrak A. E., Collopy A. X., Papalambros P. Y., Epureanu B., “Multiobjective Optimization of Modular Design Concepts for a Collection of Interacting Systems.” Structural and Multidisciplinary Optimization, 57(1), 83-94, 2017.
- Bayrak A. E., Egilmez M. M., Kuang H., Li X., Park J. M., Hu J., Papalambros P. Y., Epureanu B.I., Umpfenbach E., Anderson E., and Gorsich D., “A System of Systems Approach to Strategic Feasibility of Modular Vehicle Fleets.” IEEE Transactions on Systems, Man, and Cybernetics: Systems, (99), 1-13, 2018.
- Li X., Epureanu B. I., “Intelligent Agent-based Dynamic Scheduling for Military Modular Vehicle Fleets.” Proceedings of the 2017 Industrial and Systems Engineering Conference, Pittsburgh, PA, May 20-23, 2017.
- Li X., Epureanu B. I., “Robustness and Adaptability Analysis of Future Military Modular Fleet Operation System.” Proceedings of the 2017 Dynamic Systems and Control Conference, Tysons Corner, VA, Oct 11-13, 2017.
- Bayrak, A. E., Collopy, A. X., Epureanu, B. I., and Papalambros, P. Y., “Modular Design Concept Generation for a Collection of Interacting Systems with Application to Modular Vehicle Fleet Design”, Presented at the 12th World Congress of Structural and Multidisciplinary Optimization, Braunschweig, Germany, Jun 5-Jun 9, 2017.
- Li X., Epureanu B. I., “Management and Design of a Modular Military Vehicle Fleet: A Dynamic System Approach”, Presented at the ASME 2018 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, Cleveland, OH, Aug 6-9, 2017.