
A Perfect Pairing
Human teams are fallible. People have limitations in their reaction time and how they process information, which only worsen with fatigue. While teams of autonomous vehicles are not hindered by these limitations, these teams are constrained by real-time computational power, the amount and accuracy of sensor data, and the accuracy of decision-making capabilities of artificial intelligence.
“Both commercial and military operations executed by humans and vehicles are complex and require capabilities that neither humans nor autonomous vehicles have individually,” said Bogdan Epureanu, Director of the Automotive Research Center and the Arthur F. Thurnau Professor of Mechanical Engineering at the University of Michigan. “A combination of humans and autonomous vehicles offer the most powerful solution for all of these tasks.”
Teaming is not a new concept. It has been used in manufacturing for decades. Epureanu and his colleagues are creating simplified models to determine the best way to pair humans and autonomous systems to tackle different problems during continuously changing situations in the field. The simulations provide a way to optimize the pairing when responding to different situations.
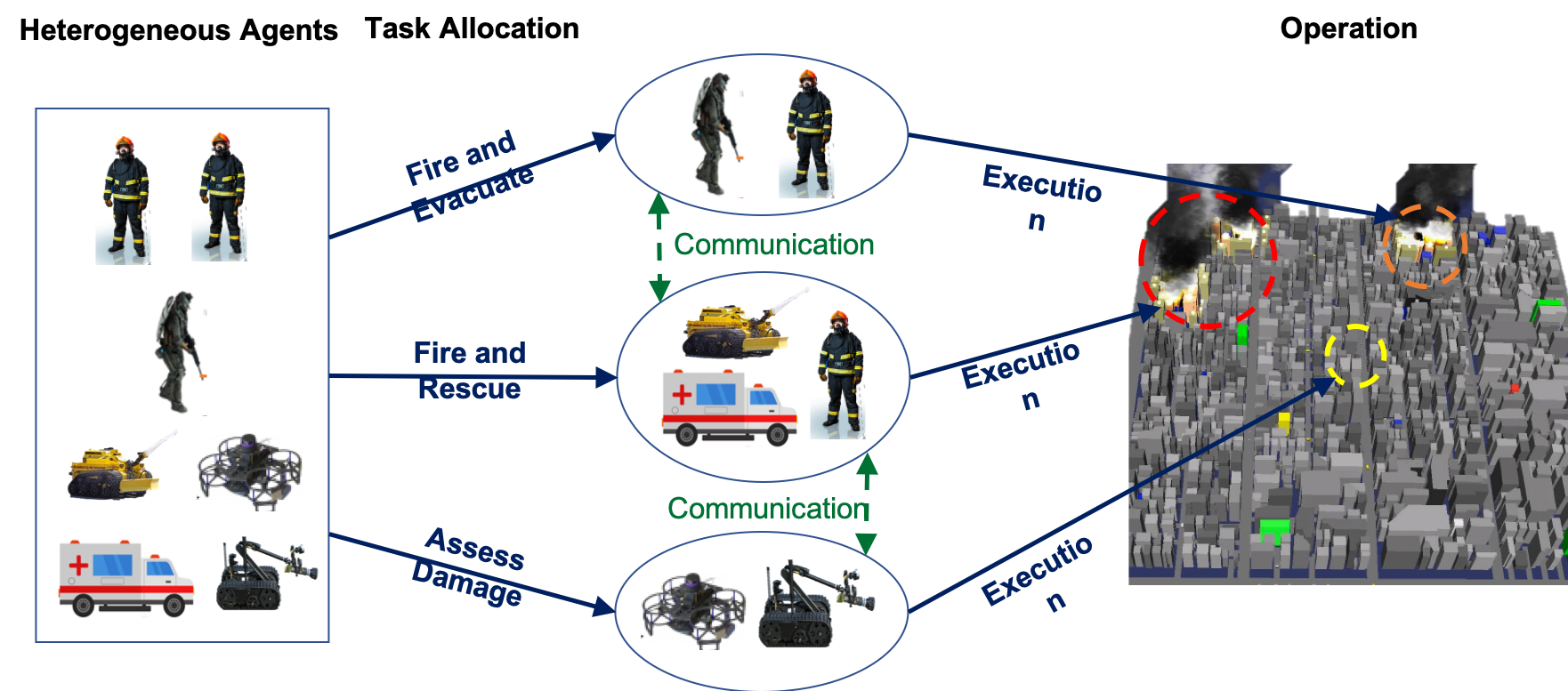
“During a disaster, the infrastructure has broken down and various things need to be done — rescue people, put out fires, repair power lines,” said Epureanu. “The team can autonomously decide which team members have the best capabilities to tackle these problems, execute solutions, and prepare for the next steps.”
Additional iterations of the model increase the complexity tackled to accommodate the unpredictable or ‘noisy’ decision-making of humans. This ‘noise’ may be attributed to random human behavior, like following hunches to solve problems. By incorporating this ‘noise’ into the model, Epureanu and his team hope to capture a more spontaneous, creative approach to improve the pairing.
To test the model results, the team will create a simulation, similar to a video game, where autonomous systems will interact with real people to evaluate how the teams strategize when solving a problem.
“Communication becomes critical,” said Epureanu. “At the end of the day, task allocation has to be dynamic to match the changing situation on the field.”
Throughout the video game, the researchers distribute rewards to autonomous systems to help them learn and improve their performance as the game progresses. Rewards are even allocated when the performance is suboptimal but not completely wrong. For example, a reward is delivered when an autonomous vehicle goes to the wrong spot but still accomplishes a task that is required for the team.
“There is a tradeoff between exploitation and exploration,” said Epureanu. “Truly dynamic teaming requires collaboration and cooperation. We are developing strategies for teams to redistribute resources to accomplish overall complex tasks.”
The results of this study are informing new designs for both the hardware and software in autonomous vehicles that could potentially revolutionize how humans cooperate with autonomous systems in the future.
Epureanu is joined by Emrah Bayrak at Stevens Institute of Technology, Mert Egilmez at Veoneer-Nissin, and Victor Paul and Jillyn Alban at the U.S. Army DEVCOM GVSC on the project titled “Optimal Distribution of Tasks in Human-Autonomy Teams.”
Stacy W. Kish