
Necmiye Ozay Advances Frontiers of Algorithm Design
Autonomous vehicles require a large number of software algorithms to control all of their systems. These algorithms run everything from the movement of the vehicle, to the function of each mechanical component, to interfaces with the human operator. Traditionally, teams of engineers work separately on each component, and they are brought together with a leap of faith and a lot of testing. If something goes wrong, it’s back to the drawing board.
But what if you had a master algorithm that could create all of the separate algorithms that go into controlling such a vehicle, anticipating errors and incompatibilities? That’s the focus of research by Dr. Necmiye Ozay, an Associate Professor of Electrical Engineering and Computer Science at UM. In her ongoing work sponsored by ARC, Ozay is developing model-based algorithms that can reveal inconsistencies early in the design process and constrain operations within certain safety parameters.
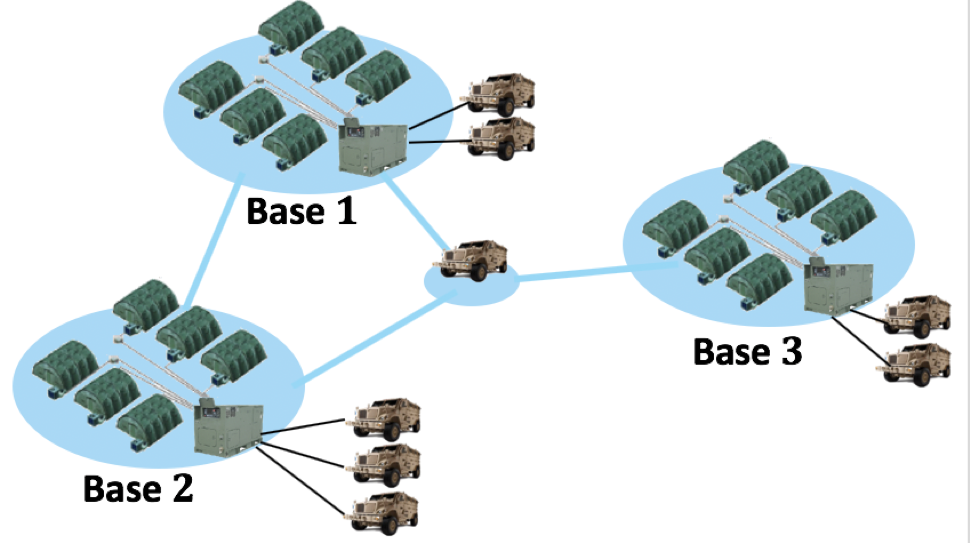
Ozay’s ARC project has a goal of developing an algorithm to direct the movements of military ground vehicles loaded with generators for camps or bases on a mission. One of the challenges of the mission is planning a path for vehicles loaded with generators to fulfill needs for power for each camp.
“Our contribution is that our algorithms can define the decision-makers for these vehicles to travel around. How big of a generator do you want to put on these vehicles? How big a battery in each bay and in each camp?” says Ozay.
Currently, these decisions are made by loading the largest possible generator and largest possible battery on each vehicle, and then deploying an excess number of vehicles to make sure there’s no shortage. But that creates a great deal of unnecessary redundancy in the system. Ozay’s algorithm will define the correct redundancy, resulting in resilience in the system without waste.
“With our algorithm, we can make informed decisions because we can relate these different decision parameters to the overall mission objectives,” says Ozay.
The overall theme of Ozay’s work is automating the design of autonomous systems. That’s a little different than the work done by engineers working on separate components of those systems. “My work is a little more abstract,” Ozay explains. “Because I am not generating the algorithm, I am coming up with algorithms that can test the correctness or ensure the correctness of other algorithms.” Ozay says that by exploiting the structure inherent in engineering systems, and doing so at a higher, more abstract level, she has been able to create algorithms that are highly scalable, and capable of very complex functions.
Ozay’s inspiration for her research came from the aerospace industry, which she interacted with during her post-doctoral work. In that industry, there are strict certification processes for software used in airplanes and helicopters. Every piece of software must be verified. In the process of making aircraft more autonomous, the amount of software running on each machine is increased, and that creates a need for algorithmic verification of software. She gained experience developing those verification algorithms that translated to her current work in self driving cars and autonomous systems at the University of Michigan.
Another example of how this principle is applied comes from a case study Ozay did with Professors Ilya Kolmanovsky and Anouck Girard from Aerospace Engineering. In that project, they were trying to learn the mobility limits of large, heavy trucks making sharp maneuvers. They showed how you can algorithmically compute a safety envelope around possible maneuvers of the truck, and guarantee that if you keep maneuvers within that envelope, the truck won’t roll over. These limits are typically learned through trial and error, but for a situation that could potentially roll over a heavy truck, it is too dangerous for human occupants to explore the limits by trial and error.
Similar ideas are also useful for civilian self driving vehicles. Ozay is developing algorithms in collaboration with Toyota that can monitor a human driver, only taking over when the driver attempts a maneuver outside the safety envelope. For example, if the driver attempts to change lanes when another vehicle is in their blind spot, the algorithm would override the human driver.
Ozay’s work is pushing the frontiers of what is possible in autonomous systems. While currently on sabbatical, she has plans to work on incorporating more machine learning into the algorithms, while still ensuring safety. She is also exploring the use of more complex sensors such as camera and LIDAR. Her overarching goal is to enable system designers and engineers to specify and verify or specify and compile the desired functionality of their autonomous system with the push of a button so that they can focus on what they want their system to achieve.
Stacy W. Kish