
Assembling the Right Team for the Mission
Every elementary school student knows the importance of strategic selection. A dodgeball member should have skills — the ability to dodge, aim, throw, and catch a ball on the fly. It is imperative for the team leader to assemble the right group of students to ensure the team is successful and does not flame out in agonizing defeat.
The stakes are even higher in real-world scenarios. Kira Barton, associate professor and a Miller Faculty Scholar in Mechanical Engineering at the University of Michigan, and her team are working to bring together the right vehicles on a team to complete crucial tasks autonomously in an ever-changing environment.
“We are picking teams that can handle a dynamic environment,” said Barton. “We are designing approaches so that teams of vehicles can handle uncertainty while still completing the mission with success. That is what we mean by resilient teams.”
Previous studies have often used vehicles with the same capabilities to complete a task autonomously. The lack of diversity limited the team’s flexibility when facing unexpected challenges.
“Despite a more complex model needed to incorporate the diversity of the team, this heterogeneity actually shrinks the problem space,” said Barton. “Because vehicles are specialized to work on specific aspects of the mission, it reduces the complexity in determining an optimal team to complete a mission.”
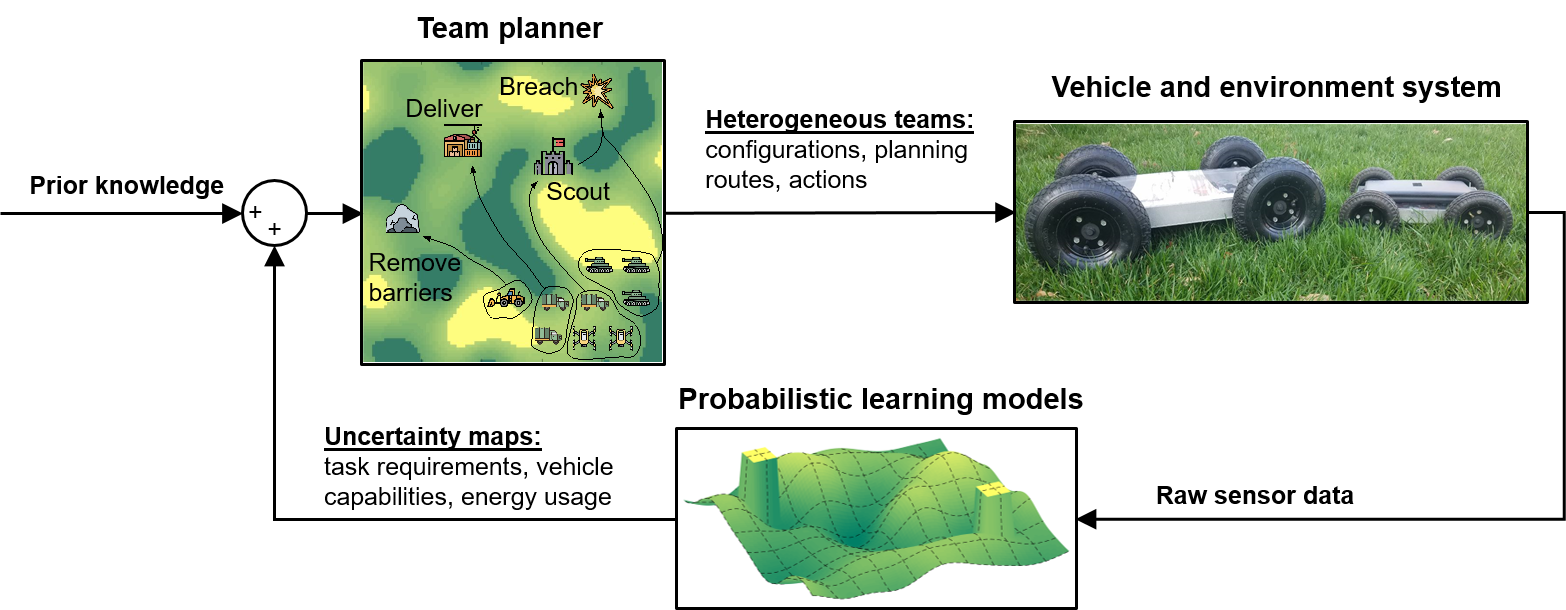
Barton and her colleagues are conducting the project in two phases. During the initial phase, they are investigating how different combinations of vehicles can lead to the creation of teams that can handle uncertainty in the environment, task assignments, and vehicle capabilities.
“We are working on the foundational pieces right now,” said Barton. “We want to develop the algorithms that provide guarantees for the team even in uncertain situations.”
The team is developing models that represent how the vehicle capabilities change over time or in different environments. These models are then used to identify vehicles that bring specialized functions to the group to achieve different goals. Once selected, the virtual team is evaluated through simulations (and later experimental tests) to determine how well it completes the task, especially when faced with unexpected changes.
“Another important part of this research is the ability to make decisions and change the team plan during a mission. On the fly you [have to] readjust and reassess the team composition and its ability to address the needs of a dynamic mission,” said Barton. “If not this team, we may look to another team that is close by to swap out vehicles that are better suited to complete the necessary tasks.”
In addition to the end goal, Barton and her team are exploring other important aspects of the team such as how quickly the team performs, the flexibility of the assembled vehicles, or the energy usage for a particular pairing of vehicles.
According to Barton, one of the most important components of this study is that the system can learn. She plans to use the data collected during each mission to update the models of vehicle capabilities to inform future team organization and reduce the uncertainty in the system. This is particularly important for handling uncertainties present in the vehicles and environment during real-world experimental operations.
Barton believes the results of this study could be applied in the delivery of supplies during military operations as well as humanitarian relief following a disaster.
###
Barton is joined by Bo Fu and Maani Ghaffari at UMich, Lilia Moshkina with SoarTech, and Matthew Castanier, Denise Rizzo, and William Smith with the U.S. Army Ground Vehicle System Center on the project, titled “Resilient Teaming: Fleet organization and decision making in heterogeneous vehicle teams to meet energy requirements in restricted and unknown environments.”
Stacy W. Kish