
An Autopilot that Pays Attention to You
You know the feeling. You experienced it many times. The feeling that there are simply too many things that need your attention at the same time. The sensory overload ramps up the stress and prevents you from performing your best.
Imagine the same driving scenario but as a soldier executing a mission. Multitasking is not an option, but a necessity. The autonomy on-board the vehicle that is capable of adapting to help operate the vehicle safely is a tantalizing solution. A team of researchers at the University of Michigan aim to achieve this goal.
The team is developing algorithms to find the sweet spot that balances control between the driver and the vehicle’s autonomous system, opening opportunities for the driver to attend to other tasks without compromising safety and performance.
“We want autonomy to be aware of and adapt to the cognitive workload of the driver in real time,” says Tulga Ersal, associate research scientist in Mechanical Engineering at UMich and the leader of the team. “This requires a multidisciplinary team with expertise in both human factors and controls.”
Ersal, a control expert, is collaborating with Xi Jessie Yang, assistant professor in the Department of Industrial and Operations Engineering at UMich, to pursue this challenge. Yang leads the efforts on estimating drivers’ workload in real time by analyzing their physiological data. Ersal leverages this information to develop the algorithms that adjust how autonomy negotiates its control authority with the driver.
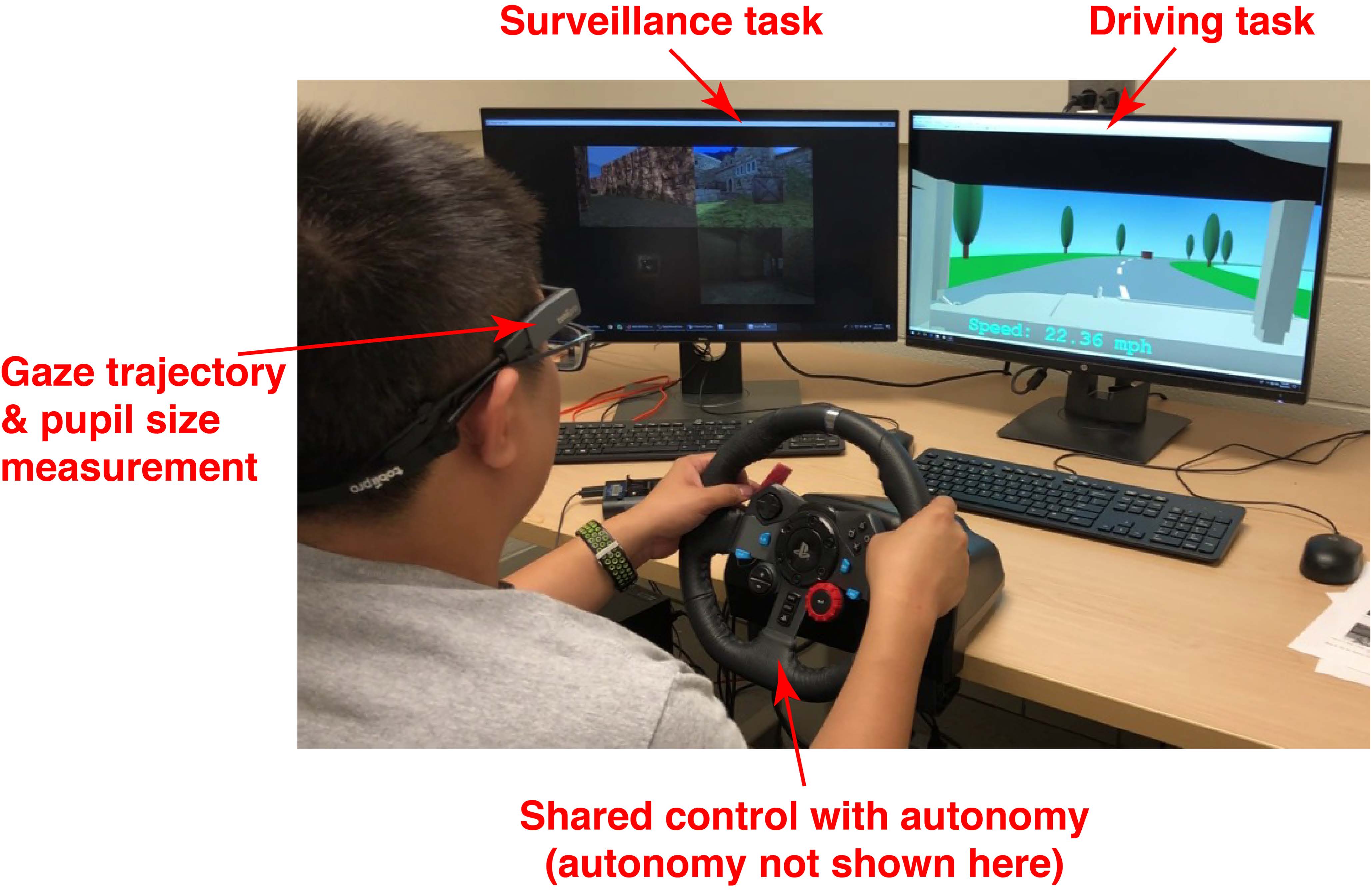
Through a series of experiments using a driving simulator, the team gathers data as the driver navigates through the simulation. The driver responds to verbal cues, as well as performs target detection tasks similar to a military mission. The team evaluates how these tasks affect the driver’s workload in real-time by tracking eye movement and heart rate.
This data is the backbone of the algorithms created to adjust autonomy’s control authority. In particular, autonomy can be more forceful in its steering actions when it is aware that the driver’s workload is high. The autonomy also backs off when the workload is normal. This gentle dance of control allows the driver to rely more on autonomy when needed.
“This adaptive technology results in higher performance and, more importantly, higher trust in the autonomy” says Yang. “These results show how promising this approach can be.”
Ersal believes these results offer an exciting proof-of-concept. He and Yang are encouraged to develop these ideas further to make them work reliably across different workloads and different environments.
The team will present some of their latest findings at the American Control Conference in Denver on July 1-3, 2020.
Ersal and Yang are joined by Jeffrey L. Stein and Matthew Reed from the University of Michigan in this project, titled “Mutually-Adaptive Shared Control between Human Operators and Autonomy in Ground Vehicles,” in collaboration with Paramsothy Jayakumar, Mark Brudnak, and Victor Paul from the Ground Vehicle System Center, and Vishnu Desaraju from the Toyota Research Institute. The project is receiving technical and financial support from the Automotive Research Center.
Stacy W. Kish