
Vehicle Controls & Behaviors
Annual PlanOptimal Control, Pairing, and Scheduling for Manned-Unmanned Vehicles Teaming based on RoboTrust Algorithms
Project Team
Government
Dariusz Mikulski, U.S. Army GVSC
Industry
Andrew Dallas, SoarTech
Student
Fangjian Li, Clemson University
Project Summary
Project began in 2017 and was completed in 2019.
Among many factors in human-robot interaction (HRI), trust is the key enabling factor in human’s acceptance and hence utilization of robot. It has been shown that trust is dynamic in nature and trust analysis is useful for task allocation in multi-robot systems. However, the trust evolution in real-time multi-robot operations has not been well addressed in the literature. It calls for further studies of dynamic evolution and propagation of trust in multiple manned-unmanned vehicles teaming. Furthermore, existing works mainly focused on qualitative analyses and the results have not been accompanied by performance guarantees.
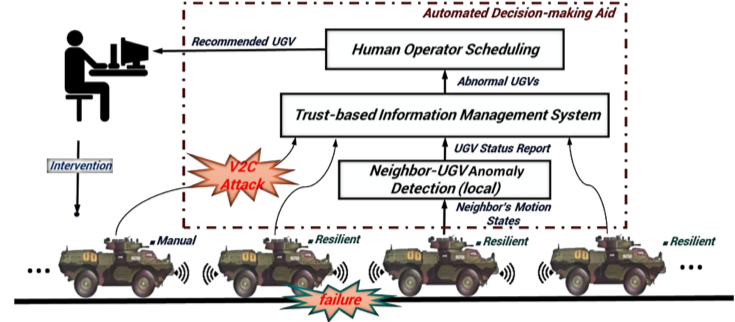
Motivated by the need for quantitative trust measures and trust-based teaming for manned and unmanned vehicles, this project developed trust-based optimal switching control, dynamic pairing, and real-time scheduling algorithms for multiple manned and unmanned vehicles. More specifically, shared autonomous resilient and manual control has been developed for each unmanned/manned ground vehicles in the presence of sensor failures or vehicle-to-vehicle cyber-attacks. A neighbor vehicle anomaly detection approach has been devised onboard each vehicle. Computational trust models have been developed to evaluate the worthiness of each vehicle in the team and utilized in a trust-based information management system to rule out unreliable information due to vehicle-to-cloud cyber-attacks. A human operator scheduling algorithm and human-computer interface have been designed to provide decision aids for the human to supervise the vehicle team. The overall trust-based human-robot teaming framework has been shown to outperform exclusively autonomous and manual operations and improved user experience.
Publications:
Wang, C., Wang, Y., and Wagner, J., “Evaluation of a Robust Haptic Interface for Semi-Autonomous Vehicles,” SAE Int. J. of CAV 2(2):2019, doi:10.4271/12-02-02-0007.
Li, F., Mikulski, D., Wagner, J., and Wang, Y., “Trust-Based Control and Scheduling for UGV Platoon under Cyber Attacks,” SAE Technical Paper 2019-01-1077, 2019.
Wang, C., Wang, Y., and Wagner, J., “Evaluation of Alternative Steering Devices with Adjustable Haptic Feedback for Semi-Autonomous and Autonomous Vehicles,” SAE Technical Paper 2018-01-0572, 2018, https://doi.org/10.4271/2018-01-0572.
Wang, C., Wang, Y., & Wagner, J. R. (2018). Evaluation of alternative steering devices with adjustable haptic feedback for semi-autonomous and autonomous vehicles (No. 2018-01-0572). SAE Technical Paper.
H. Saeidi, D. G. Mikulski, and Y. Wang, “Trust-Based Leader Selection for Bilateral Haptic Teleoperation of Multi-Robot Systems”, IEEE/RSJ International Conference On Intelligent Robots and Systems (IROS), Vancouver, Canada, September 24-28, 2017.
Wang X., Wang Y. (2017) Co-design of Control and Scheduling for Human–Swarm Collaboration Systems Based on Mutual Trust. In: Wang Y., Zhang F. (eds) Trends in Control and Decision-Making for Human–Robot Collaboration Systems. Springer, Cham. https://doi.org/10.1007/978-3-319-40533-9_16