
Human-Autonomy Interaction
integrativeNo Driver? No Problem: Mobility Across the Autonomy Spectrum in Unmanned Group Vehicles
Project Summary
Case study performed in 2015.
Contributors (TA 1 & 2): Tulga Ersal, Dawn Tilbury, Brent Gillespie, Jeffrey Stein, Jiechao Liu†, Yingshi Zheng†, Justin Storms†, Paul Boehm† (UM), Paramsothy Jayakumar, James Poplawski, Jaisankar Ramalingam (GVSC), Mitchell Rohde (Quantum Signal) (†Students)
Unmanned ground vehicles (UGVs) of all sizes are invaluable assets for the Army. The Army has used more than 7,000 ground robots to date to secure the battlefield and autonomy-enabled systems are a key element of TARDEC’s 30-year strategy. UGVs also have significant commercial potential. Ground robots can already help with performing tasks ranging from cleaning floors to handling warehouse materials, and the race for developing and deploying self-driving cars is heating up.
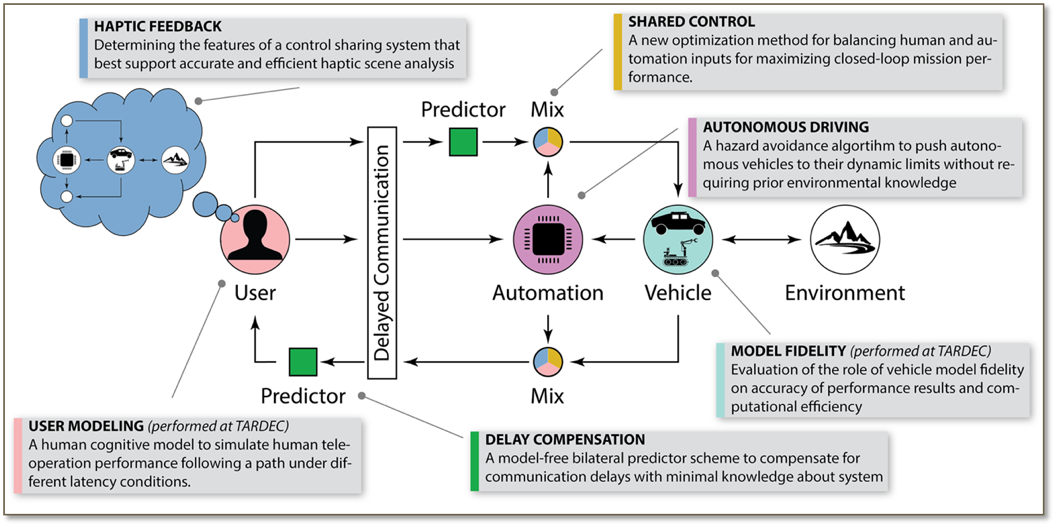
When it comes to the level of autonomy of UGVs, there is a whole spectrum ranging from teleoperated vehicles with no autonomy to fully autonomous vehicles that rely on on-board sensors and controllers only. Every level of autonomy has its own advantages and challenges in terms of mobility, and understanding and improving each level’s mobility capabilities is crucial for the successful design and appropriate selection of UGV operating modes.
This case study highlighted collaborative efforts in the ARC between academia, TARDEC, and industry to understand and push the boundaries of level-of-autonomy versus mobility trade-offs. Three vehicle platforms (Superdroid, mini Baja, and HMMWV) were considered along with three modes of operation (teleoperation, shared control, and full autonomy). Efforts highlighted included (i) robust compensation of delays in teleoperation; (ii) increasing the haptic scene analysis capability of human operators in shared control mode; (iii) identifying the best strategies to reconcile human and controller inputs in shared control; (iv) full autonomy in unstructured environments without a priori information; (v) cognitive modeling of human operators; and (vi) the role of model fidelity in simulation based evaluations of UGV technologies.
In this study’s scenario, there was a 29% improvement in speed and 46% reduction in lane keeping error due to predictors in a teleoperated HMMWV. Up to 38% improvement was observed in speed with shared control in a Superdroid. A successful autonomous obstacle avoidance at high speed was acheived for an autonomous HMMWV.