
Human-Autonomy Interaction
integrativeWho’s the Boss? – A Haptic Interface for Negotiating Control Authority Between Human Drivers and Automation Systems
Project Summary
Case study was performed in 2017.
Contributors (TA 1 & 2): Tulga Ersal, Brent Gillespie, Jeffrey Stein, Amirhossein Ghasemi†, Akshay Bhardwaj†, Huckleberry Febbo†, Yingshi Zheng† (UM), Paramsothy Jayakumar (GVSC), Mitch Rohde, Steve Rohde (Quantum Signal), John Walsh (Ford Motor Company) (†Students)
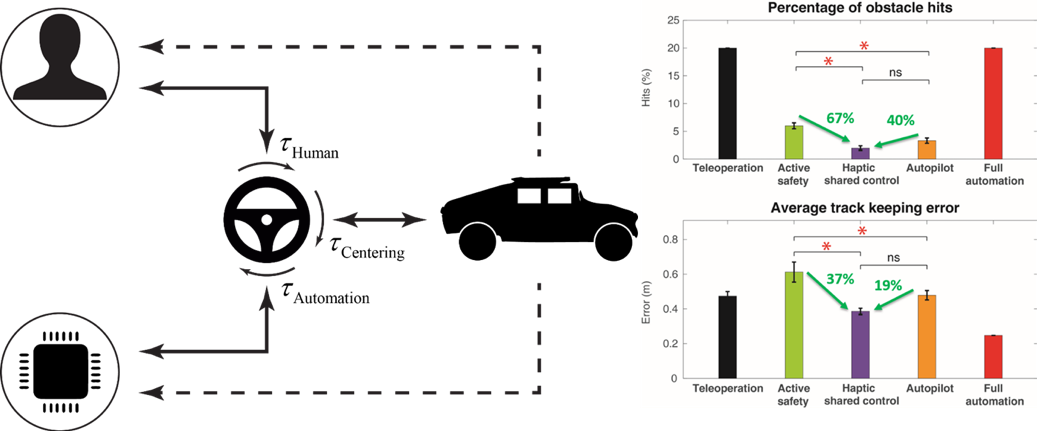
Recognizing the potential for autonomous systems to dramatically increase mobility in both military and civilian applications and their critical role in the Third Offset Strategy of the Department of Defense, this case study brought together three projects to explore how control actions generated by an autonomous system and a human driver can be combined to achieve greater mobility than achievable when either control action acts alone. We first presented an autonomous navigation algorithm designed to fully exploit the dynamic limits of a vehicle to maximize its mobility when navigating through an obstacle field. Supposing that intermittent sensor faults might preclude fully autonomous operation, we then used the steering wheel as a haptic interface to facilitate smooth negotiation of control between a remote human driver and the automation system. We explored a control sharing paradigm in which the autonomous system applies its control effort through a finite mechanical impedance such that the human driver can feel and in effect “edit” the autonomous system’s control actions. Likewise, the automation could edit the human driver’s control actions. We compared performance at lane keeping and obstacle avoidance under this haptic control sharing paradigm to performance under more traditional alternatives using a fixed base driving simulator. In addition, we considered communication delays between the remote human driver and the vehicle and explored the benefits of a novel predictor framework to attenuate the negative impact of delays on mobility performance in this haptic shared control paradigm.
Publications:
A. Bhardwaj, A. Ghasemi, Y. Zheng, H. Febbo, P. Jayakumar, T. Ersal, J. L. Stein, and B. Gillespie, “Who’s the Boss? Arbitrating Control Authority between a Human Driver and Automation System,” Transportation Research Part F: Psychology and Behaviour, vol. 68, pp. 144-160, 2020.