
Vehicle Controls & Behaviors
integrativeStranded: Avoiding the Perils of Unknown Environments Through the Synthesis of Energy, Soil, and Adversary Localization Maps
Project Summary
Case study was performed in 2018.
Contributors (TA 1 & 5): Kira Barton, Dimitra Panagou, Lauro Ojeda, Michael Quann† (UM), Ardalan Vahidi (CU), Denise Rizzo, William Smith (GVSC), Frank Koss, Andrew Dallas (SoarTech) (†Student)
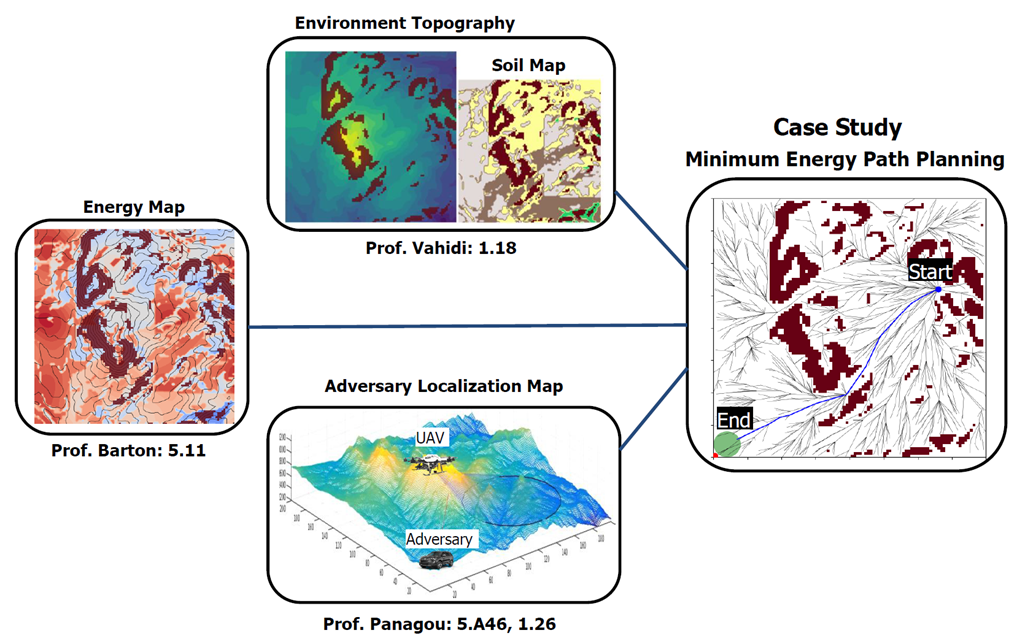
This case study brought together three ARC projects to investigate how enhanced situational awareness would improve 3D energy mapping in off-road environments. An important aspect in off-road energy mapping is the synthesis of a priori topography information combined with real-time dynamic updates. To address this need, this case study combined an energy-mapping framework with (1) the utilization of static soil and elevation maps to provide a priori information that enabled prioritization of initial areas of interest within the environment based on uncertainties associated with the energy costs of a given location; and (2) dynamic updates from aerial maps that provided near real-time information about the terrain (wet, dry) and identified “go / no-go” locations in the environment based on adversarial elements. Thus, the soil, terrain, and aerial maps were integrated into the energy-mapping framework for enhanced decision-making. The addition of these maps improved the reachability analysis and energy mapping efficiency of multi-robot reconnaissance in an unknown environment through the identification of go / no-go locations and targeted areas of interest. A simulation study was used to evaluate the effectiveness of the combined mapping approach.
Publications:
A. Bhardwaj, A. Ghasemi, Y. Zheng, H. Febbo, P. Jayakumar, T. Ersal, J. L. Stein, and B. Gillespie, “Who’s the Boss? Arbitrating Control Authority between a Human Driver and Automation System,” Transportation Research Part F: Psychology and Behaviour, vol. 68, pp. 144-160, 2020.