
Intelligent Power Systems
Annual PlanRobotic Range Extender: Power and Energy Management for a Hybrid Powertrain with Quantized Power Sources
Project Team
Principal Investigator
Jason Siegel, University of Michigan Anna G. Stefanopoulou, University of MichiganGovernment
John (Jack) Hartner, Denise Rizzo, U.S. Army GVSC
Industry
Tom Westrich, Ultra AMI Fuel Cells
Buz McCain, Ballard Power Systems Inc.
Student
Yuanzhan Wang, Miriam Figueroa, University of Michigan
Project Summary
Project duration: May 2015 through 2017.
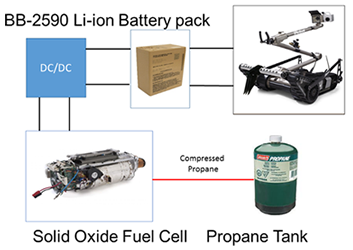
There is a need for quiet, long-life power sources for robotic vehicles which cannot be met by batteries (due to endurance), or with combustion engines (due to noise). Hybrid power that combines a battery with small, propane-fueled solid oxide fuel cell (SOFC) has been demonstrated using an Ultra Electronics AMI 245 Watt fuel cell and a BB2590 battery pack. The project will address optimal power and energy management of a hybrid battery and fuel cell system powering a tracked mobile robot and hence will directly assist GVSC with the recently launched program in Man-Transportable Robotic System MTRS.
This effort will advance the state of the art in SOFC degradation models by coupling a physics based temperature distribution with stress based degradation mechanism to evaluate the performance loss over a realistic usage profile for the SOFC when hybridized with lithium ion battery pack. The power profiles for PackBot driving cycles provided by GVSC will be used to develop statistical models of the vehicle load and evaluate the impact of battery sizing, and the State of Charge thresholds for FC startup-shutdowns on stack and battery cell life.
The hybrid SOFC configuration presents new power management challenges given the following special characteristics of the SOFC power plant: (1) the fuel cell lacks load-following ability and therefore operates most of the time at a constant power output; (2) each SOFC startup and shutdown event takes several minutes and consumes significant battery power and shortens the useable stack life. Although this hybrid configuration contains much more usable energy than a pure-battery system, its novel combination of a variable power output battery with a fixed-output fuel cell, both with comparable power outputs, requires new control methodologies to make it an effective solution for the mobile robot application.
While the conventional hybrid has been heavily studied, the quantized SOFC-battery hybrid has not been studied apart from the hybridization with a gas turbine. New systematic methodologies are needed to get optimum power and endurance from this system. Prior ARC work on the SOFC-Battery hybrid power management shows that a hybrid automaton with discrete linear states can be used to model the system electrical behavior. The previous ARC project on reconfigurable control culminated by addressing applications to the important SOFC/Battery problem using an approach that was good for an initial study but ultimately limited in scope due to simplifying assumptions.
Publications:
- Y. Kim, B.A. McCain and A. Stefanopoulou, “Trajectory Optimization for Electrified Trams without Catenary Cable.” Presented at IFAC E-COSM 2015, Aug, 24-26, Columbus, OH.
- J. B. Siegel, Y. Wang, A. G. Stefanopoulou and B. A. McCain, “Comparison of SOFC and PEM Fuel Cell Hybrid Power Management Strategies for Mobile Robots,” Vehicle Power and Propulsion Conference (VPPC), 2015 IEEE, Montreal, QC, 2015, pp. 1-6. doi: 10.1109/VPPC.2015.7352914.