
Vehicle Controls & Behaviors
Annual PlanReconfigurable Control for Failure Prevention and Recovery
Project Team
Government
Herb Dobbs, Robert Karlsen, U.S. Army GVSC
Faculty
Ella Atkins, University of Michigan
Industry
Doug MacKenzie, Mobile Intelligence Corp.
Jon Rice, Ultra Electronics, AMI
Student
John Broderick, University of Michigan
Project Summary
Project began in 2008 and was completed in 2014.
Future robotic vehicles including small UGVs and full-scale vehicles will be driven with multiple sources of power including batteries, fuel cells, combustion engines, ultracapacitors, etc. Different energy sources have different capacities and performances, including thermal responses. Heavy armor and sealed compartments can exacerbate thermal management, and overheating can lead to mission failure.
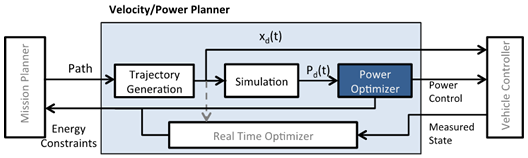
This project developed optimization-based controllers for UGV power usage and generation based on multi-dimensional models for energy sources. These controllers can take into account mission objectives, available energy, and thermal state to optimally plan trajectories that accomplish the mission. Coverage missions that leverage our previous work (energy usage and conservation for UGVs executing coverage tasks) were considered; alternate missions include persistent stare, logistics resupply, leader-follower, etc. While previous work has modeled power systems with multiple energy sources, this research optimizes power usage based on discrete switching as well as regulation of the energy sources. The study of switched power systems is motivated by an AMI 200W on/off fuel cell, capable of running on propane, and can augment battery energy storage to improve endurance of UGVs such as the Talon.
Publications & Reports:
- J. A. Broderick, D. M. Tilbury, and E. M. Atkins, “Characterizing Energy Usage of a Commercially Available Ground Robot: Method and Results,” J. Field Robotics, 31: 441–454, 2014. doi:10.1002/rob.21507
- J. A. Broderick, D. M. Tilbury, and E. M. Atkins, “Modeling and Scheduling of Multiple Power Sources for a Ground Robot,” Proceedings of the ASME DSCC, DSCC2014-6111, 2014. doi:10.1115/DSCC2014-6111
- J. A. Broderick, D. M. Tilbury, and E. M. Atkins, “Optimal Coverage Trajectories for a UGV, with Tradeoffs for Energy and Time,” Autonomous Robots, Volume 36, Issue 3, pp 257-271, March 2014. doi:10.1007/s10514-013-9348-x
- J. Broderick, D. M. Tilbury, and E. M. Atkins, “Supervisory Traction Control for a Slipping UGV,” Proceedings of the American Control Conference, Washington, DC, June 2013. doi: 10.1109/ACC.2013.6580509
- J. Broderick, E. Atkins, D. Tilbury, “Maximizing Coverage for Mobile Robots while Conserving Energy,” in Proceedings of the ASME IDETC/CIE, DETC2012-70443, Chicago, August 2012. doi:10.1115/DETC2012-70443
- J. Broderick, D. M. Tilbury, and E. M. Atkins, “Energy usage for UGVs executing coverage tasks,” Proc. SPIE 8387, Unmanned Systems Technology XIV, 83871A (May 1, 2012); doi:10.1117/12.919376
- B. Moore, E. M. Atkins, and D. M. Tilbury, “Thermal Modeling for Temperature Aware Operations in Field Robots,” in Proceedings of the ASME Dynamic Systems and Control Conference, Ft. Lauderdale, FL, October 2012. doi:10.1115/DSCC2012-MOVIC2012-8748
- D. M. Tilbury and A. G. Ulsoy, “Reliable Operations of Unmanned Ground Vehicles: Research at the Ground Robotics Reliability Center,” In Proceedings of IARP workshop on technical challenges for dependable robots in human environments, pp. 27-32. Toulouse, June 2010. (PDF link)
- J. Langsfeld, E. Atkins, and D. Tilbury, “Exploiting Kinematic Redundancy in the Packbot Manipulator to Improve Post-Failure Reliability,” GRRC Technical Report, September 2011.
- J. Hall, “Dynamic Simulation and Collision Modeling of the Packbot Manipulator”, GRRC Technical Report, August 2010.
- J. Titus, D. Tilbury, A. G. Ulsoy, “Understanding Failure Modes of Unmanned Ground Vehicles”, GRRC Technical Report, April 2009.
- P.-N. Nguyen-Huu, J. Titus, D. Tilbury, A. G. Ulsoy, “Reliability and Failure in Unmanned Ground Vehicle,” GRRC Technical Report, Feb. 2009.
#1.13