
Vehicle Controls & Behaviors
Annual PlanPhysics Augmented Artificial Intelligence
Project Team
Government
David Gorsich, Christian Balas, U.S. Army GVSC
Industry
Eric Tseng, Ford Motor Company
Student
Xianan Huang, Pingping Lu (post-doc), University of Michigan
Project Summary
Project #1.23 began in 2018 and was completed in 2019
Artificial intelligence (AI) is identified as a key future competitive strategy by GVSC and autonomous driving is one of the high-potential applications of AI. Most of the current Convolutional/Deep Neural Networks (CNN/DNN) approaches to AI do not have a clear way to leverage physics, dynamic models or other sensor measurement. This research aims to study an alternative approach to mainstream AI study. The main objective is to study, analyze, and explore the best way to use physics-based knowledge and model to complement the performance of CNNs/DNNs. The goal is to achieve better performance, better robustness and reduce training/computation load.
GVSC researchers benefits from the deliverables from this research:
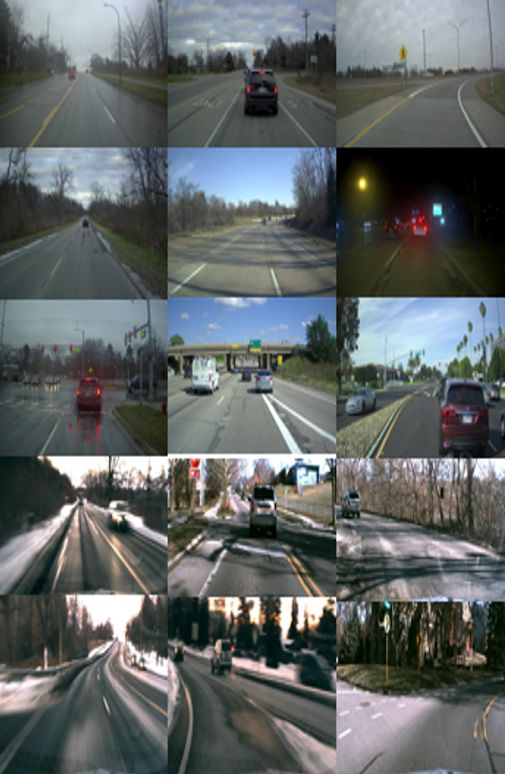
- images collected both from open sources as well as from the MCity test vehicle,
- two physics-enhanced DNN solutions developed, with better accuracy and robustness compared with DNN-only solutions.
The physics-enhanced lane detection algorithms are implemented with Pytorch and embedded as a ROS node, which can receive other sensor information (e.g., camera, GPS/IMU) and broadcast lane message (e.g., lane types, offsets, heading angle, curvature and its derivate). The preview steering control is implemented with C++ and also embedded as a ROS node, which requires lane detection results and vehicle states (e.g., velocity, acceleration, etc.) and outputs pedal and throttle control information. The above two modules are tested on the experimental vehicle in both independent and joint ways. Additionally, the end-to-end steering control module is also embedded as a ROS node to directly transform from camera images to steering angles.
1.23
Publications:
Lu, P., Cui, C., Xu, S., Peng, H., & Wang, F. (2021). SUPER: A novel lane detection system. IEEE Transactions on Intelligent Vehicles, 6(3), 583-593.