
Human-Autonomy Interaction
Annual PlanModeling Bi-Directional Trust in Semi-Autonomy for Improved System Performance
Project Team
Government
Victor Paul, Ben Haynes, U.S. Army GVSC
Faculty
Xi Jessie Yang, University of Michigan
Industry
Mitch Rohde, Quantum Signal
Student
Luke Petersen, Hebert Azevedo Sa, Connor Esterwood. Suresh Kumaar Jayaraman, Huajing Zhao, University of Michigan
Project Summary
Project #2.9 began in 2017 and was completed in 2020.
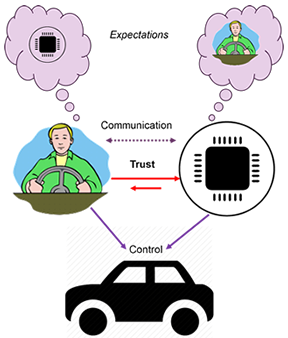
In this project we examine factors that impact a driver’s trust in the vehicle’s autonomy and vice versa before and after interactions. When one agent meets the expectations of another agent, the willingness to give control over to that agent may increase. Similarly, when an agent fails to meet the expectations, the willingness to give control over to that agent should decrease.
Autonomous and semi-autonomous vehicles have the potential to help drivers successfully and safely complete many military missions while providing the drivers with the flexibility to address other pressing issues. Unfortunately, drivers have failed to fully leverage a vehicle’s autonomy because of a lack of trust in the vehicle’s autonomy. Within the framework of autonomy, we will consider a suite of semi-autonomous behaviors, including maintaining a given speed, staying within a lane (or on the road) as appropriate, avoiding obstacles, maintaining a given distance behind a lead vehicle.
Our goal is to develop methods to predict (1) when the human is likely to take or give control of the driving to the vehicle’s autonomy, and (2) when the vehicle’s autonomy should take or give control of the driving to the driver. To accomplish this, we have the following objectives.
- To understand and model the set of expectations a driver relies on to determine trust in an autonomous vehicle.
- Develop a set of expectations the autonomous vehicle should have to determine its level of trust in the driver.
- To understand how a driver’s individual attributions are likely to impact how much they trust their vehicle’s autonomy and how their vehicle’s autonomy should trust them.
- To understand how much risk relative to trust is needed in a given situation to trigger either the driver or autonomous vehicle to take control.
- Develop models of the interplay between the driver’s expectations vs the actions of the autonomous vehicle and vice versa in a given situation to understand the development, decline and repair of trust between the driver and the autonomous vehicle.
Other Publications:
- Petersen, L., Robert, L., Yang, X., Tilbury, D. (2017). Effects of Augmented Situational Awareness on Driver Trust in Semi-Autonomous Vehicle Operation. In 9th Annual Ground Vehicles and Systems Engineering & Technology Symposium (GVSETS). Novi, MI. August 2017.
- Petersen, L., Zhao, H., Tilbury, D., Yang, X., Robert, L., The Influences of Risk on Driver Trust in Autonomous Driving Systems, in 10th Annual Ground Vehicles and Systems Engineering & Technology Symposium (GVSETS). Novi, MI. August 2018.
- Petersen, L., Robert, L., Yang, J., & Tilbury, D. (2019). Situational awareness, driver’s trust in automated driving systems and secondary task performance. SAE International Journal of Connected and Autonomous Vehicles, 2(2):129-141, 2019, https://doi.org/10.4271/12-02-02-0009. Also found on DeepBlue. Recognized with Vincent Bendix Automotive Electronics Engineering Award.
- Zhao, H., Azevedo-Sa, H., Esterwood, C., Yang, X. J., Robert, L., & Tilbury, D. (2019). Error Type, Risk, Performance, and Trust: Investigating the Different Impacts of false alarms and misses on Trust and Performance. In 11th Annual Ground Vehicles and Systems Engineering & Technology Symposium (GVSETS). Novi, MI. August 2019
2.9
Publications:
Azevedo-Sa, H., Zhao, H., Esterwood, C., Yang, X. J., Tilbury, D. M., & Robert Jr, L. P. (2021). How internal and external risks affect the relationships between trust and driver behavior in automated driving systems. Transportation research part C: emerging technologies, 123, 102973.
Azevedo-Sa, H., Jayaraman, S. K., Esterwood, C. T., Yang, X. J., Robert Jr, L. P., & Tilbury, D. M. (2021). Real-time estimation of drivers’ trust in automated driving systems. International Journal of Social Robotics, 13(8), 1911-1927.
Azevedo-Sa, H., Jayaraman, S. K., Yang, X. J., Robert, L. P., & Tilbury, D. M. (2020). Context-adaptive management of drivers’ trust in automated vehicles. IEEE Robotics and Automation Letters, 5(4), 6908-6915.
Azevedo-Sa, H., Jayaraman, S. K., Esterwood, C. T., Yang, X. J., Robert Jr, L. P., & Tilbury, D. M. (2020, March). Comparing the Effects of False Alarms and Misses on Humans’ Trust in (Semi) Autonomous Vehicles. In Companion of the 2020 acm/ieee international conference on human-robot interaction (pp. 113-115).