
Human-Autonomy Interaction
Annual PlanManned-Unmanned Teaming for Reconnaissance in Adversarial Environments
Project Team
Principal Investigator
Pratap Tokekar, Previously Virginia Tech; Currently University of Maryland Ed Durfee, University of MichiganGovernment
Jonathon Smereka, Joseph Lee, U.S. Army GVSC
Industry
Bob Bechtel, SoarTech
Project Summary
Project #2.11 began in 2019, developed from exploratory efforts by each investigator.
The DoD and GVSC long term planning guides indicate a required effort towards developing and integrating autonomous systems into theater operations. A core component of this integration involves MUM-T with an essential capability to quickly react to dynamic environments and/or mission objectives. New research efforts that can integrate high-level battle knowledge and reaction capabilities into the autonomy platform are needed to enable this integration. However, without autonomy algorithms that effectively plan the movements of MUM-T and prevent them from being exposed to potentially hostile threats, MUM-T operations will be vulnerable and severely limited.
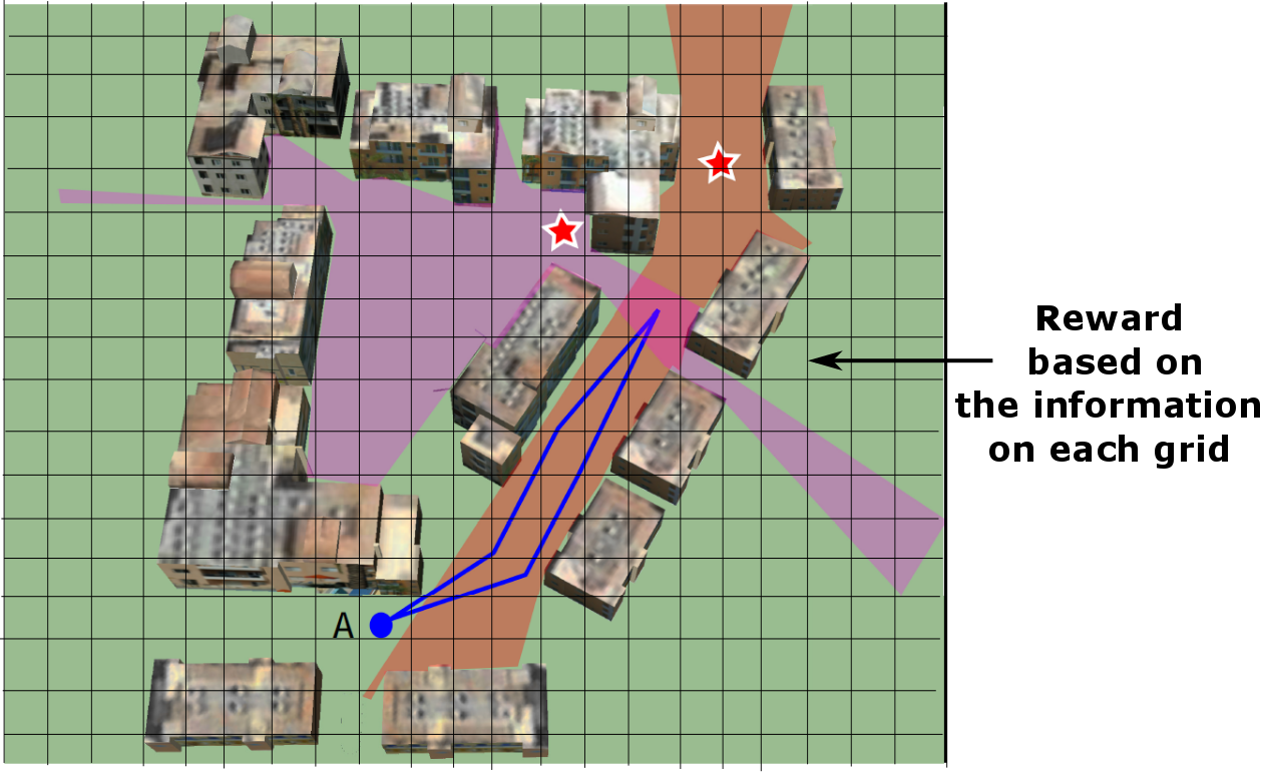
The goal of this project is to develop real-time decentralized planning algorithms for MUM-T agents that are operating in complex and adversarial environments. Our focus is on scenarios where the agents are faced with conflicting objectives — patrol the environment while minimizing the risk of being detected by the adversary. We seek to devise real-time decentralized control and coordination strategies that will allow trading-off conflicting objectives. A key component will be on manned-unmanned teaming where the unmanned agents react to the human teammates’ actions in real-time.
Research outcomes were demonstrated in the 2019 case study: “Know Your Situation: Reconnaissance in Adversarial Environments with Manned and Unmanned Agents”.
2.11
Publications:
Durfee, E. H., Thakur, A., & Goldweber, E. (2020). Teammate-pattern-aware autonomy based on organizational self-design principles. Autonomous Agents and Multi-Agent Systems, 34(2), 39.