
Human-Autonomy Interaction
Annual PlanManned-Unmanned Teaming for Reconnaissance in Adversarial Environments
Project Team
Principal Investigator
Pratap Tokekar, Previously Virginia Tech; Currently University of Maryland Ed Durfee, University of MichiganGovernment
Jonathon Smereka, Joseph Lee, U.S. Army GVSC
Industry
Bob Bechtel, SoarTech
Project Summary
Project began in 2019, developed from exploratory efforts by each investigator.
The DoD and GVSC long term planning guides indicate a required effort towards developing and integrating autonomous systems into theater operations. A core component of this integration involves MUM-T with an essential capability to quickly react to dynamic environments and/or mission objectives. New research efforts that can integrate high-level battle knowledge and reaction capabilities into the autonomy platform are needed to enable this integration. However, without autonomy algorithms that effectively plan the movements of MUM-T and prevent them from being exposed to potentially hostile threats, MUM-T operations will be vulnerable and severely limited.
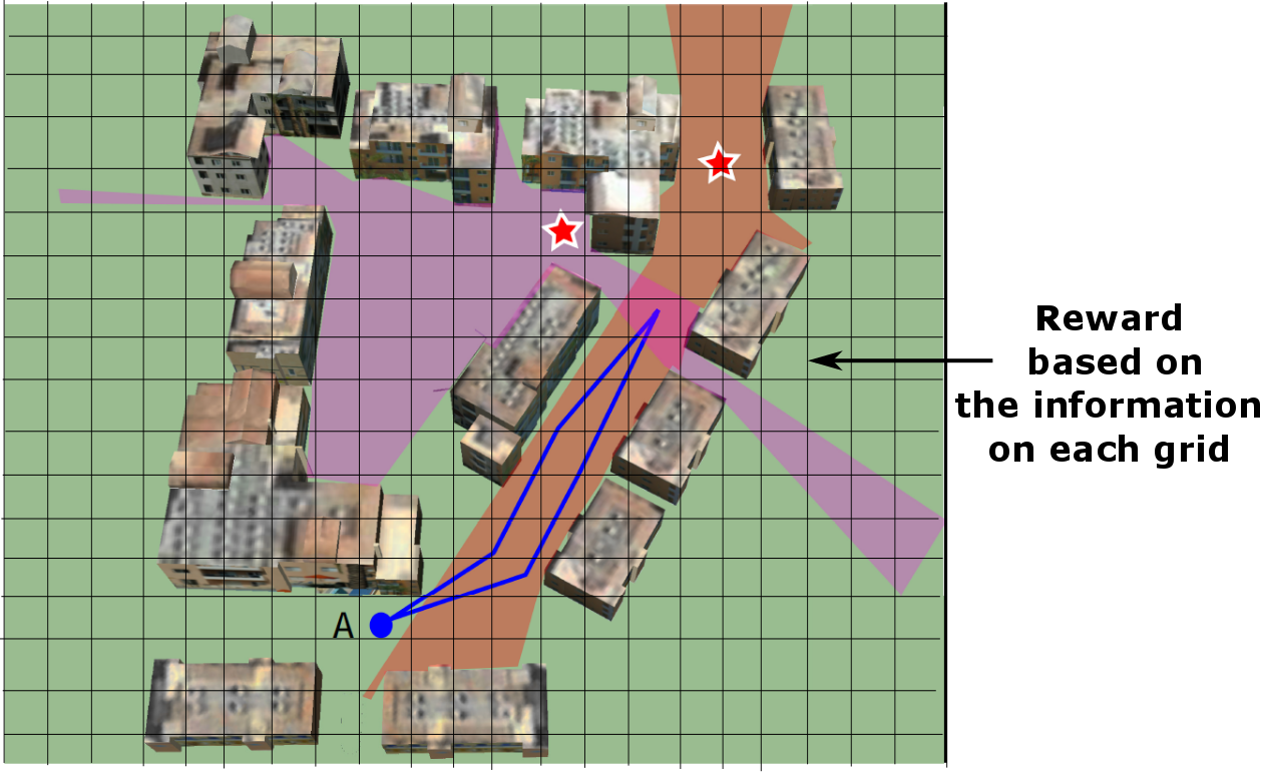
The goal of this project is to develop real-time decentralized planning algorithms for MUM-T agents that are operating in complex and adversarial environments. Our focus is on scenarios where the agents are faced with conflicting objectives — patrol the environment while minimizing the risk of being detected by the adversary. We seek to devise real-time decentralized control and coordination strategies that will allow trading-off conflicting objectives. A key component will be on manned-unmanned teaming where the unmanned agents react to the human teammates’ actions in real-time.
Publications from Prior Work closely related to the proposed project:
- Z. Zhang, J. Lee, J. Smereka, Y. Sung, L. Zhou, and P. Tokekar, “Tree search techniques for minimizing detectability and maximizing visibility,” IEEE Robotics and Automation Letters, 2018, under review.
- E. H. Durfee and A. Thakur, “Towards teammate-pattern-aware autonomy,” in In Notes of the IJCAI 2018 Workshop on Autonomy in Teams. International Foundation for Autonomous Agents and Multiagent Systems, 2018, pp. 463–470.
- P. Maini, G. Gupta, P. Tokekar, and S. P. B., “Visibility-based persistent monitoring in a 1.5 d terrain using a heterogenous robot team,” in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, to appear.
- Y. Sung and P. Tokekar, “Algorithm for searching and tracking an unknown and varying number of mobile targets using a limited fov sensor,” in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), May 2017, pp. 6246–6252.