
Systems of Systems & Integration
integrativeLearn Your Limits: Protecting Autonomous Vehicles From Violating Safety Limits Through Learning
Project Summary
Case study was performed in 2019.
Contributors (TA 5): Ilya Kolmanovsky, Anouck Girard, Necmiye Ozay, Tulga Ersal, Kaiwen Liu†, Nan Li†, Manuel Lanchares Prieto†, Liren Yang†, Zexiang Liu† (UM), Denise Rizzo, Matt Castanier (GVSC), Ken Butts (Toyota), Amey Karnik (Ford) (†Students)
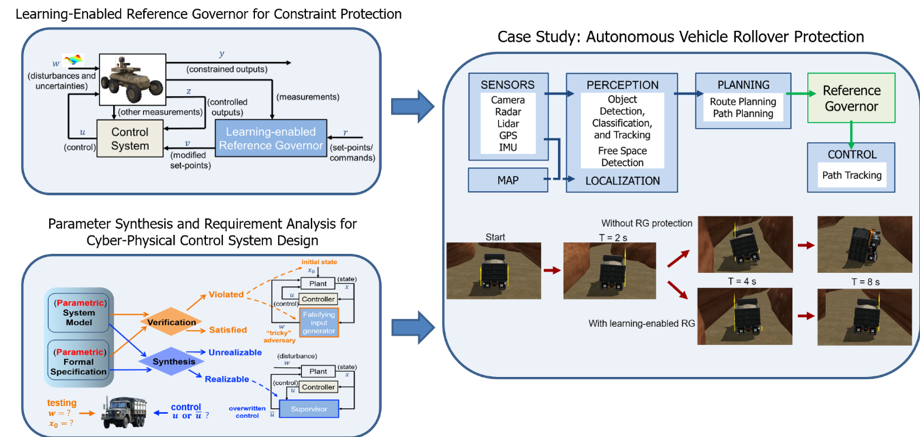
Military ground vehicles have demanding mission and performance requirements that may push vehicles to their limits. Vehicle, payload, or mission changes can change these limits. A common practice is to operate conservatively and avoid violation of these limits in the worst case scenario. While safety constraints can be satisfied with this approach, vehicle performance and mobility can be unnecessarily limited, in particular in emergency situations. Therefore, autonomous vehicles need to be capable of learning the new safety limits as they change and fully utilizing them when needed.
This case study brought together two ARC projects to create a learning reference governor that allows aggressive maneuvers to be executed with safe exploitation of mobility limits. To this end, a reference governor was developed for rollover prevention that can learn the vehicle’s load transfer limits without constraint violation. This reference governor was then augmented with a robust safe set to accelerate the learning. Furthermore, a new approach was developed to reduce the computation time of the robust safety envelopes. Simulation studies on a notional M915A3 truck showed that the reference governor can learn the lateral load transfer limits safely without constraint violation and help the autonomous steering algorithm drive the vehicle at these limits without rollover. The robust safe set was computed 60-85% faster and reduced the learning time by 25%. Thus, the proposed approach protected the vehicle while avoiding overly-conservative behavior.
Publications:
A. Bhardwaj, A. Ghasemi, Y. Zheng, H. Febbo, P. Jayakumar, T. Ersal, J. L. Stein, and B. Gillespie, “Who’s the Boss? Arbitrating Control Authority between a Human Driver and Automation System,” Transportation Research Part F: Psychology and Behaviour, vol. 68, pp. 144-160, 2020.