
Systems of Systems & Integration
Annual PlanIntelligent Reconnaissance: An Energy-Efficient Method for Multi-Robot Reconnaissance in an Unknown Environment
Project Team
Government
Denise Rizzo, William Smith, U.S. Army GVSC
Industry
Frank Koss, Andrew Dallas, SoarTech
Student
Michael Quann, University of Michigan
Project Summary
Work began in 2016 and was completed in 2018.
Reconnaissance is a task that is particularly well suited for an intelligent vehicle system, as computers can observe a region for features of interest continuously using several methods of sensing. As the technologies are developed that will enable such a vehicle to unburden the occupants of certain reconnaissance tasks, there is a need for coordination and networking of these vehicles.
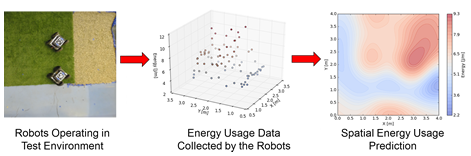
In this project, we developed strategies to coordinate a reconnaissance mission using a collection of unmanned ground vehicles in challenging and uncertain terrains. These vehicles are capable of mapping the energy costs of the terrain while traversing within the environment, providing critical information for real-time coordination and planning to ensure mission success within a constrained energy allocation.
Our decision-making architecture presents new management challenges given the specific combination of cooperative decision-making and terrain-based energy management. The unique contributions of this project include: (1) the development and experimental testing of a framework for predicting robot energy costs in 3D environments through spatial mapping of data collected by the robot during operation; (2) theoretical development of energy-based reachability analyses based on the spatial mapping framework for applications in mission planning and situational awareness; and (3) extensions of the spatial mapping framework to multiple heterogeneous robots to enable utility in applications such as multi-robot reconnaissance and environmental monitoring.
Publications:
- M. Quann, L. Ojeda, W. Smith, D. Rizzo, M. Castanier and K. Barton, “An energy-efficient method for multi-robot reconnaissance in an unknown environment,” 2017 American Control Conference (ACC), Seattle, WA, 2017, pp. 2279-2284.
- M. Quann, L. Ojeda, W. Smith, D. Rizzo, M. Castanier and K. Barton, “Ground Robot Terrain Mapping and Energy Prediction in Environments with 3-D Topography,” 2018 Annual American Control Conference (ACC), Milwaukee, WI, 2018, pp. 3532-3537.
- Michael Quann, Lauro Ojeda, William Smith, Denise Rizzo, Matthew Castanier, Kira Barton, “Chance constrained reachability in environments with spatially varying energy costs”, Robotics and Autonomous Systems, Vol. 119, pp 1-12, ISSN 0921-8890, 2019.
- Quann, M, Ojeda, L, Smith, W, Rizzo, D, Castanier, M, Barton, K. “Off‐road ground robot path energy cost prediction through probabilistic spatial mapping”. J Field Robotics. 1– 19, 2019.
- M. Quann, L. Ojeda, W. Smith, D. M. Rizzo, M. P. Castanier and K. Barton, “Power Prediction for Heterogeneous Ground Robots through Spatial Mapping and Sharing of Terrain Data,” in IEEE Robotics and Automation Letters. doi: 10.1109/LRA.2020.2967717