
Vehicle Controls & Behaviors
integrativeI Want It All: Achieving High Fidelity and Optimal Computational Complexity in Physics-Based Off-Road Mobility Simulations
Project Summary
Case study was performed in 2018.
Contributors (TA 1): Hiroyuki Sugiyama, Hiroki Yamashita, Guanchu Chen† (UI), Shravan Veerapaneni, Eduardo Corona† (UM), Paramsothy Jayakumar, Yeefeng Ruan (GVSC), Kenneth Leiter (ARL), Mustafa Alsaleh (Caterpillar Inc.) (†Students)
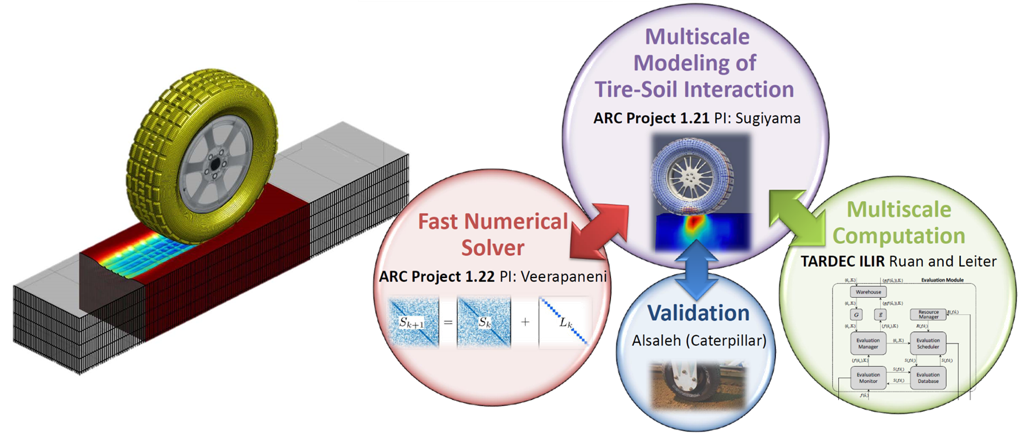
A high-fidelity computational vehicle-terrain interaction model is essential for physics-based off-road mobility simulations in achieving accurate mobility performance prediction as well as reliable operational planning. This case study brought together two projects to address accuracy and computational efficiency of physics-based vehicle-terrain interaction simulation capabilities, which can be fully integrated into general multibody dynamics (MBD) simulation algorithms. For this purpose, a hierarchical multiscale terrain dynamics model was developed to eliminate phenomenological assumptions in existing constitutive models and was further extended to tire-soil interaction simulation. The finite-element (FE) model was utilized to predict macroscale soil deformation, while the microscale constitutive behavior was modeled by the representative volume element (RVE) using the discrete-element (DE) approach to describe complex soil failure phenomenon including strain localization. Validation and comparison with single-scale FE and DE approaches were presented. Furthermore, to improve computational efficiency of different components of the coupled MBD-FE-DE vehicle-terrain interaction simulation capability, fast solvers based on hierarchical low-rank factorizations were applied and the ensuing speedups were demonstrated on several test cases.
Publications:
A. Bhardwaj, A. Ghasemi, Y. Zheng, H. Febbo, P. Jayakumar, T. Ersal, J. L. Stein, and B. Gillespie, “Who’s the Boss? Arbitrating Control Authority between a Human Driver and Automation System,” Transportation Research Part F: Psychology and Behaviour, vol. 68, pp. 144-160, 2020.