
Human-Autonomy Interaction
Annual PlanCognitive Modeling of Human Operator Behavior during Interaction with Autonomous Systems
Project Team
Government
Paramsothy Jayakumar, Michael Cole, U.S. Army GVSC
Industry
James Poplawski, Perception, Veoneer
Student
Chen Li, University of Michigan
Project Summary
Project #2.11 started May 2019 and was completed in Q3 2023.
The overarching goal of this project is to enable fully simulation-based evaluations of shared control paradigms by developing a cognitive human driver model that is applicable in scenarios where the vehicle control tasks are shared between a human and autonomy.
The potential of autonomy “to shift human attention to higher-level reasoning and judgement” has been identified as an important expected benefit of artificial intelligence in the 2018 Department of Defense AI Strategy, and modeling and simulation of such capability requires a human driver model.
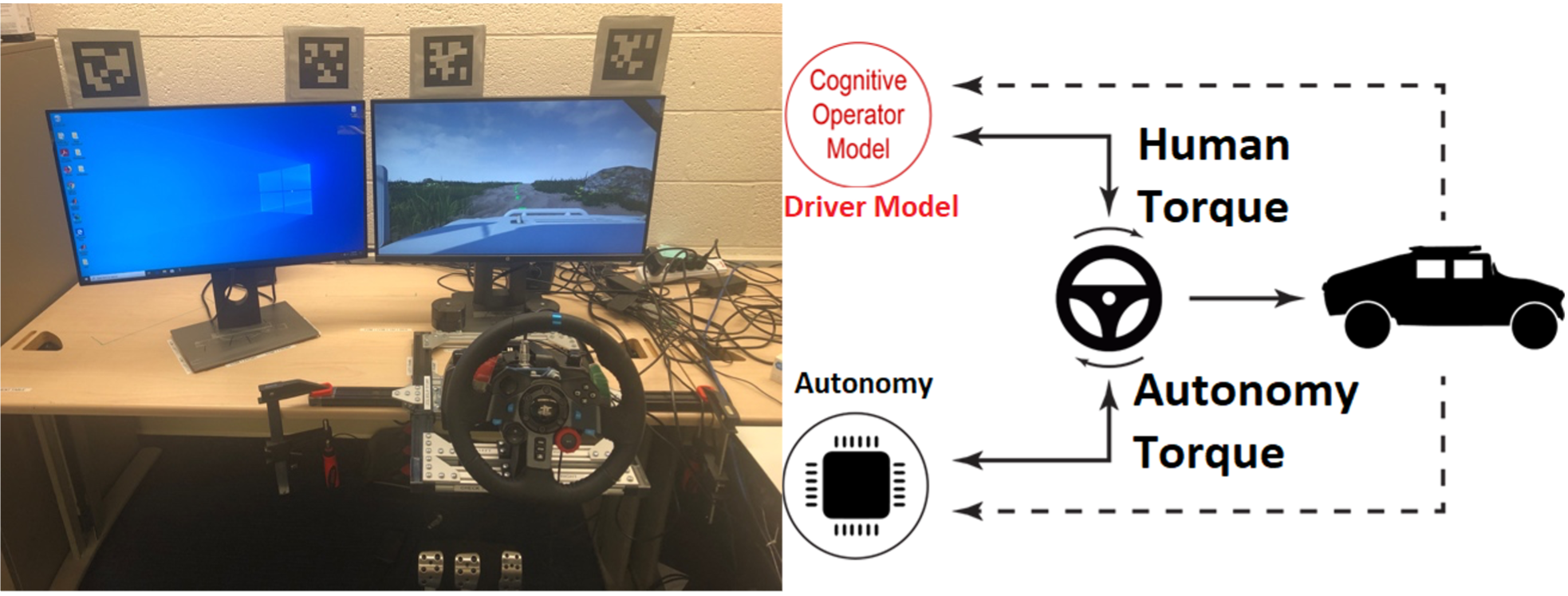
In a shared control setting, the presence of a human operator offers contingency options to complement the limitations of autonomous systems. The state-of-the-art methodology in researching such frameworks is to use human subjects for development and testing purposes, which is time consuming and not even applicable until the algorithms under development can be implemented in real time. A human operator model is thus needed to accelerate the development and evaluation process of shared control strategies by allowing fully simulation based engineering practices; i.e., simulations in which every component of the system is represented mathematically including the human operator.
2.12
Publications:
Li, C., Tang, Y., Zheng, Y., Jayakumar, P., & Ersal, T. (2022). Modeling human steering behavior in teleoperation of unmanned ground vehicles with varying speed. Human factors, 64(3), 589-600.
Li, C., Cole, M., Jayakumar, P., & Ersal, T. (2024). Modeling Human Steering Behavior in Haptic Shared Control of Autonomy-Enabled Unmanned Ground Vehicles. Human Factors, 66(4), 1235-1248.