
Vehicle Controls & Behaviors
Annual PlanAdversarially Robust Coordination for Autonomous Multi-Vehicle Systems
Project Team
Government
Paul Muench, U.S. Army GVSC
Industry
John Sauter, SoarTech
Student
James Usevitch, University of Michigan
Project Summary
Project #1.26 started in 2018 and was completed Q1 2021.
This project envisions to increase the existing levels of autonomy of networked multi-vehicle systems in adversarial environments by fundamentally considering for the first time both the safety and the resilience aspects of dynamic multi-agent networks.
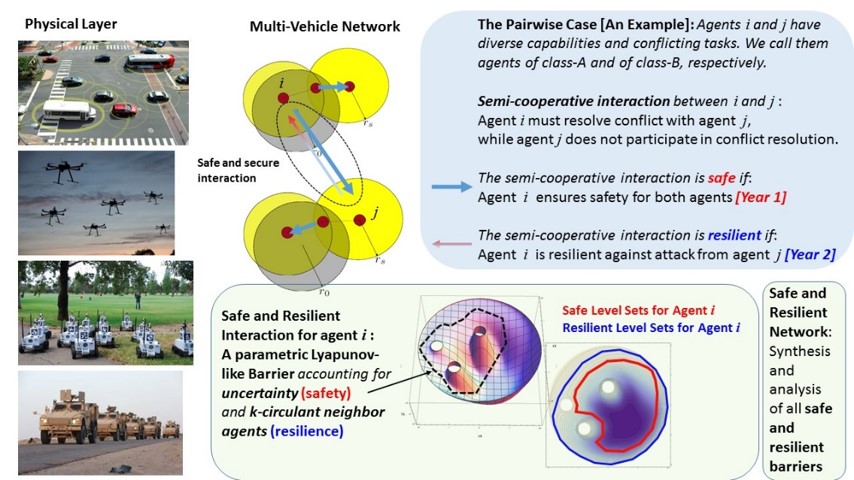
By safety we mean the generation of guaranteed collision-free trajectories for multiple vehicles (agents) so that they navigate efficiently in cluttered environments while collaborating towards a common task (e.g., data gathering). Multi-agent collaboration in principle requires coordination and negotiation mechanisms among the agents; these mechanisms are implemented using information shared over wireless communication links. However, wireless communication is vulnerable to cyber-attacks. By resilience we mean the guaranteed safe accomplishment of the mission despite the presence of possible adversaries that can send malicious data over compromised communication links.
We established robust (resilient) communication structures for the network, as well as estimation (filtering) and control (coordination/negotiation) mechanisms that allows the multi-agent network to tolerate or mitigate the adversarial effects of malicious data in the communication structure, while still maintaining safety guarantees.
1.26
Publications:
Usevitch, J., & Panagou, D. (2022). Adversarial resilience for sampled-data systems under high-relative-degree safety constraints. IEEE Transactions on Automatic Control, 68(3), 1537-1552.
Usevitch, J., & Panagou, D. (2021, May). Adversarial resilience for sampled-data systems using control barrier function methods. In 2021 American Control Conference (ACC) (pp. 758-763). IEEE.
Usevitch, J., Garg, K., & Panagou, D. (2020, December). Strong invariance using control barrier functions: A Clarke tangent cone approach. In 2020 59th IEEE Conference on Decision and Control (CDC) (pp. 2044-2049). IEEE.
Usevitch, J., & Panagou, D. (2020, July). Resilient finite-time consensus: A discontinuous systems perspective. In 2020 American Control Conference (ACC) (pp. 3285-3290). IEEE.
Usevitch, J., & Panagou, D. (2019). Resilient leader-follower consensus to arbitrary reference values in time-varying graphs. IEEE Transactions on Automatic Control, 65(4), 1755-1762.
Usevitch, J., & Panagou, D. (2020). Determining r-and (r, s)-robustness of digraphs using mixed integer linear programming. Automatica, 111, 108586.
J. Usevitch and D. Panagou, “Determining r-Robustness of Digraphs Using Mixed Integer Linear Programming,” 2019 American Control Conference (ACC), Philadelphia, PA, USA, 2019, pp. 2257-2263, doi: 10.23919/ACC.2019.8814405.
Usevitch, J., Garg, K., & Panagou, D. (2018, December). Finite-time resilient formation control with bounded inputs. In 2018 IEEE conference on decision and control (CDC) (pp. 2567-2574). IEEE.
Usevitch, J., & Panagou, D. (2018, June). Resilient leader-follower consensus to arbitrary reference values. In 2018 annual american control conference (ACC) (pp. 1292-1298). IEEE.
Usevitch, J., & Panagou, D. (2019, December). Resilient leader-follower consensus with time-varying leaders in discrete-time systems. In 2019 IEEE 58th Conference on Decision and Control (CDC) (pp. 5432-5437). IEEE.