
Vehicle Controls & Behaviors
Annual PlanPhysics-Based Multiscale Continuum-Discrete Deformable Terrain Model for Off-Road Mobility Simulation
Project Team
Government
Paramsothy Jayakumar, Yeefeng Ruan, U.S. Army GVSC
Faculty
Hiroki Yamashita, University of Iowa
Industry
Mustafa Alsaleh, Caterpillar Inc.
Student
Guanchu Chen, University of Iowa
Project Summary
Project #1.21 began in 2017 and was completed in 2019.
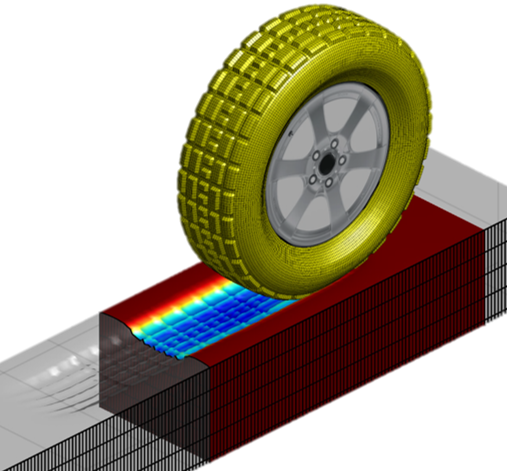
A physics-based high-fidelity computational model for tire-soil interaction is essential to demonstrate mobility capability in various operational military scenarios, and the overall vehicle performance on sand and rough dirt roads needs to be carefully evaluated at various design stages to avoid vehicles being stuck in sand and to ensure survivability of soldiers. To establish an end-to-end off-road mobility solver, the physics-based high-fidelity tire model is developed in this study using the finite element absolute nodal coordinate formulation to efficiently model the tire and soft soil interaction for high-fidelity off-road mobility simulations. While existing explicit finite-element tire models have been successfully used for predicting stresses in tires as well as the normal contact pressure distribution under steady-state rolling conditions for passenger cars, they are not suited for the analysis of transient tire dynamics under severe maneuvers of off-road military vehicles, in which transient tire force characteristics and interaction with deformable terrains play a crucial role in predicting the overall vehicle performance. Furthermore, special treatments are required to integrate the finite element models into general multibody dynamics computer algorithms for vehicle dynamics simulation due to the essential difference in formulations and solution procedures used in multibody dynamics and classical finite element approaches.
This study, therefore, aims to develop a high-fidelity physics-based tire-soil interaction simulation capability using flexible multibody dynamics techniques based on the finite element absolute nodal coordinate formulation to eliminate the Army’s reliance on empirical tire-soil models for off-road mobility simulation. To this end, the following key issues are addressed in this study: (1) development of a physics-based tire model that can be seamlessly integrated into general multibody dynamics computer algorithm for off-road mobility simulation; (2) development of deformable soil models that can be integrated into the tire dynamics simulation framework; (3) development of high performance computing (HPC) schemes for continuum-based tire-soil interaction simulation; and (4) validation of the new off-road mobility solver against soil bin mobility test data.
1.21
Publications:
Yamashita, H., Chen, G., Ruan, Y., Jayakumar, P., & Sugiyama, H. (2020). Parallelized multiscale off-road vehicle mobility simulation algorithm and full-scale vehicle validation. Journal of Computational and Nonlinear Dynamics, 15(9), 091007.
Chen, G., Yamashita, H., Ruan, Y., Jayakumar, P., & Sugiyama, H. (2020, August). Multiscale Off-Road Mobility Simulation With Computational Load Balancing for Lower-Scale Discrete-Element Models. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 83914, p. V002T02A022). American Society of Mechanical Engineers.
Yamashita, H., Chen, G., Ruan, Y., Jayakumar, P., & Sugiyama, H. (2019). Hierarchical multiscale modeling of tire–soil interaction for off-road mobility simulation. Journal of Computational and Nonlinear Dynamics, 14(6), 061007.
Yamashita, H., Chen, G., Ruan, Y., Jayakumar, P., & Sugiyama, H. (2019, August). Vehicle-Terrain Interaction Simulation With Parallelized Multiscale Moving Soil Patch Model. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 59261, p. V006T09A040). American Society of Mechanical Engineers.
Yamashita, H., Jayakumar, P., Alsaleh, M. and Sugiyama, H., 2018, “Physics-Based Deformable Tire-Soil Interaction Model for Off-Road Mobility Simulation and Experimental Validation”, ASME Journal of Computational and Nonlinear Dynamics, doi: 10.1115/1.4037994.
Yamashita, H., Chen, G., Brauchler, A., Ruan, Y., Jayakumar, P., & Sugiyama, H. (2018, August). Computer Implementation of Hierarchical FE-DE Multiscale Approach for Modeling Deformable Soil in Multibody Dynamics Simulation. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 51838, p. V006T09A028). American Society of Mechanical Engineers.