
Systems of Systems & Integration
Annual PlanParameter Synthesis and Requirement Analysis for Cyber-Physical Control System Design
Project Team
Government
Margaret Horton, U.S. Army GVSC
Industry
Amey Karnik, Ford Motor Company
Student
Liren Yang, Zexiang Liu, University of Michigan
Project Summary
Projected started in 2018 and is ongoing.
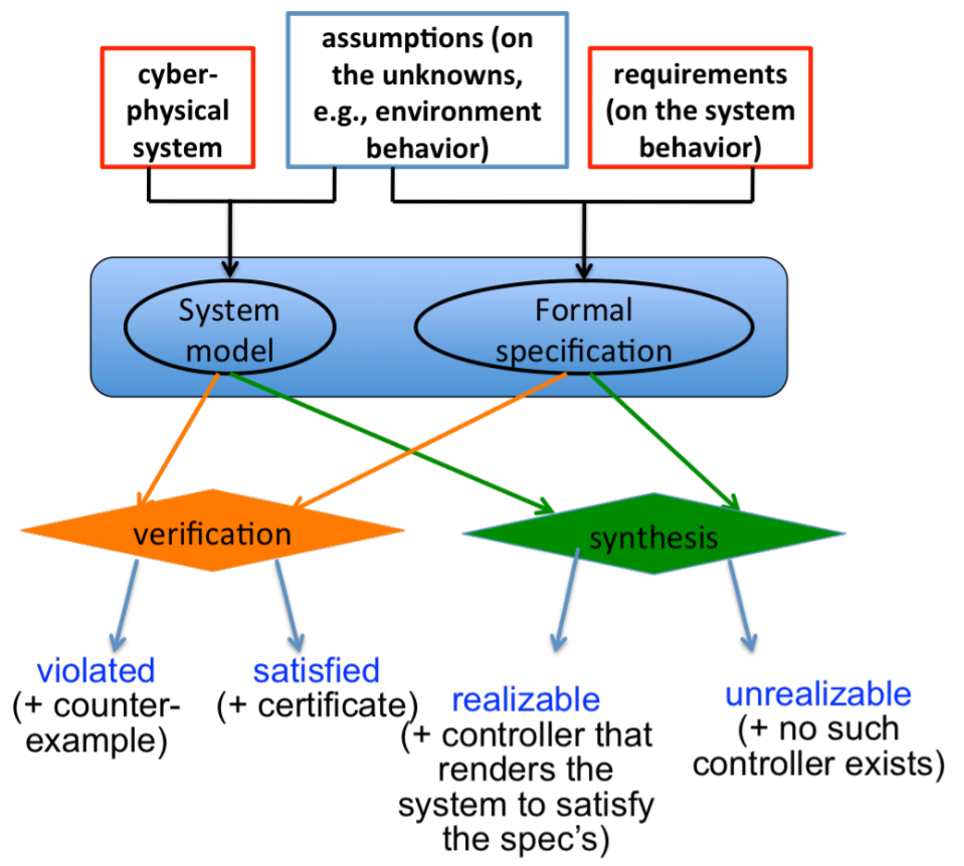
Current design processes for cyber-physical systems mostly rely on extensive testing to ensure the final product complies with its specifications. However, design errors discovered towards the end of design cycles are costly both financially and in terms of time. A model-based approach that uses mathematical models of the system dynamics and formal specifications capturing requirements and assumptions, and that is supported by formal verification and control synthesis algorithms can be extremely useful to discover inconsistencies early in the design cycle and to provide guarantees on the closed-loop behavior. Such requirement driven design processes are particularly useful for system integrators like GVSC as they coordinate different design teams and integrate subsystems from different subcontractors.
This project aims to develop methodologies to understand how requirement satisfaction and safe operating envelopes of systems depend on certain parameters of the system design or external environment, including the parameters of other subsystems the system interacts with. The proposed quantitative methodologies and tools will enable GVSC engineers to analyze requirements and study the effects of different parameters in requirement satisfaction.
Publications:
- Correct-by-construction control synthesis for buck converters with event-triggered state measurement, by Liren Yang, Xiaofan Cui, Al-Thaddeus Avestruz, Necmiye Ozay, in American Control Conference, June 2019.
- Quickly Finding Recursively Feasible Solutions for MPC with Discrete Variables, by Liren Yang, Amey Karnik, Necmiye Ozay, in 2019 IEEE Conference on Control Technology and Applications, August 2019.