
Vehicle Controls & Behaviors
Annual PlanModeling Human Performance in Operating Unmanned Ground Vehicles
Project Team
Government
Paramsothy Jayakumar, U.S. Army GVSC
Industry
James Poplawski, Ford
Student
Hossein Mirinejad (post-doc), University of Michigan
Project Summary
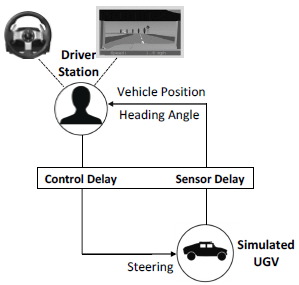
The overarching goal of this project is to develop a driver model to enable purely simulation-based studies of human performance in operating unmanned ground vehicles (UGVs) in teleoperation and shared-control modes as a function of communication delays.
Currently fielded Army UGVs are teleoperated; i.e., remote human operators control all actions taken by the UGV. Many elements of UGV teleoperation systems, including sensors, actuators, and communication links, can introduce delays and other effects such as reduced situational awareness that are not present in a manned system. Extensive research has shown that such effects degrade the ability of a human teleoperator to successfully complete mission objectives, thus decreasing the effective capabilities of the platform, including mobility. Research has also shown that adding autonomy to the vehicle can help address the aforementioned challenges with teleoperation and increase mobility. However, a robust fully-autonomous solution does not yet exist. Hence, shared control becomes an attractive solution, where the inputs of human teleoperators and autonomous systems are combined to obtain a performance that exceeds what either is capable of alone.
modeling and simulation can enable evaluation of UGV mobility across the full range of shared control options from pure teleoperation to full autonomy without having to engage in expensive human testing. However, to perform such evaluations, models for simulating realistic human inputs to a teleoperation or shared control scheme are necessary. So far, no model has been shown to capture both the steering and speed control performance of a human operator in a teleoperation or shared control setting as a function of communication delays. Addressing this research question is the motivation for this project.
This project aims to leverage the human-in-the-loop driving simulator, proportional-derivative control based driver model, and vehicle platform model and autonomous navigation algorithm that have been developed in related ARC project.
Publications:
- H Mirinejad, P. Jayakumar, T. Ersal, “Modeling human steering behavior during path following in teleoperation of unmanned ground vehicles,” in review by GVSC for submission to IEEE Transactions on Systems, Man, and Cybernetics: Systems.