
Vehicle Controls & Behaviors
Annual PlanAdvanced Hazard Avoidance in Autonomous Ground Vehicles
Project Team
Government
Paramsothy Jayakumar, U.S. Army GVSC
Industry
Mitchell Rohde, Steve M. Rohde, Quantum Signal LLC
Student
Huckleberry Febbo, University of Michigan
Project Summary
Project began mid-2016 for a length of 2 years.
Communication delays and reduced situational awareness negatively affect mobility performance in teleoperation. Purely simulation based studies are not yet feasible due to the challenges with modeling human teleoperators. How to divide the control authority between the human operator and autonomy for best performance, both with and without communication delays, is a research question for the semi-autonomous mode. How much improvement in performance semi-autonomy can offer is also an open research question. Finally, one of the research challenges in the fully autonomous mode of operation is to push the vehicle to its performance limits in an unknown, unstructured environment.
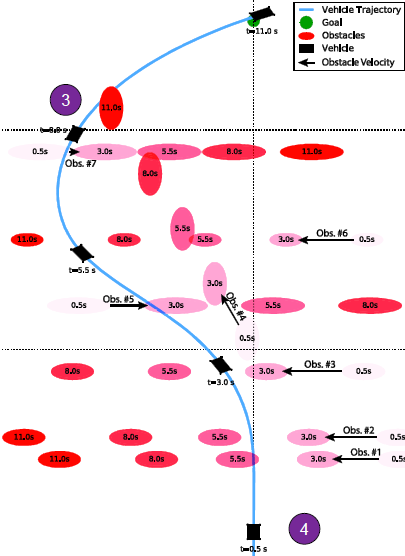
The research objective is threefold: (1) incorporate results of prior research that include a 2D LIDAR model and 14 DoF vehicle model; (2) extend the formulation to add in an algorithm that detects and tracks moving obstacles; and (3) characterize the performance of the formulation to be able to handle moving obstacles through simulation studies under various scenarios with different number of obstacles, speeds, directions, and sizes.
This project extends the mobility of autonomous ground vehicles by including moving obstacles in the formulation of the obstacle avoidance algorithm that was developed in ARC Project “Vehicle-Dynamics-Conscious Real-Time Hazard Avoidance in Autonomous Ground Vehicles".
Publications:
- Febbo, H, Liu, J.; Jayakumar, P.; Stein, J. L. and T. Ersal, “Moving obstacle avoidance for large, high-speed autonomous ground vehicles,” in proceedings American Control Conference, Seattle, WA, 2017. doi:10.23919/ACC.2017.7963821