
Vehicle Controls & Behaviors
Annual PlanA Decision-Based Mobility Model for Semi and Fully Autonomous Vehicles
Project Team
Government
David Gorsich, U.S. Army GVSC
Industry
Judson Estes, Fiat Chrysler
Student
Christopher Slon (post-doc), Line Deschenes, Sam Kassoumeh (SMART fellow), Oakland University
Project Summary
Project #1.25 began in 2018 and was completed in 2021.
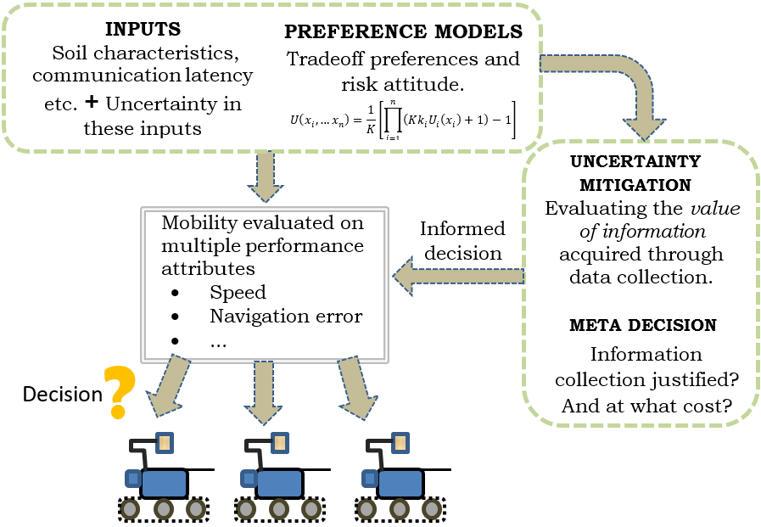
The objective of this work is to develop a decision-theoretic method to define and measure the mobility for ground vehicles exhibiting partial to full-autonomy. More generally, this research provides a rigorous methodology of evaluating ground vehicle systems and thereby help with acquisition, operational and sustainment decisions pertaining to them. Some example decision scenarios where the method provides guidance are:
- A given ground vehicle platform is robust but also cost prohibitive to sustain.
- A path planned through a hostile terrain may be quicker, but jeopardizes vehicle safety.
- Should additional terrain strength information be acquired, given the cost and time constraints?
A software tool for decision making is developed. The tool begins with the capturing of decision maker’s preferences in the form of a utility function based on the responses to statistically generated questions. While the multilinear utility function is an option, we have developed techniques to generalize them to include binary attributes, ones that have a cut-off level, and also when the attribute set is large. A value-function based assessment method has also been incorporated which uses regression/ML to first encode tradeoff behavior. The tool uses a probability wheel based assessment for capturing preferences under risk, which helps with convergence to an acceptable value. For a set of alternatives and associated uncertainties (acquired through tests or simulations), the tool returns the best alternative, the relative attribute-wise performance gap between pairs of alternatives, and value of information on stochastic alternatives.
1.25
Publications:
Pandey, V., Bos, J. P., Ewing, J., Kysar, S., Oommen, T., Smith, W., … & Gorsich, D. (2021). Decision-Making for Autonomous Mobility Using Remotely Sensed Terrain Parameters in Off-Road Environments. SAE International Journal of Advances and Current Practices in Mobility, 3(2021-01-0233), 1682-1689.
Mollan, C., Pandey, V., Slon, C., & Gorsich, D. (2021, August). Sequentially Utility Maximizing Path Planning Using a Distributed Pool Architecture. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 85390, p. V03BT03A008). American Society of Mechanical Engineers.
Pandey, V., Slon, C., Deschenes, L., Gorsich, D., & Jayakumar, P. (2020). A Decision Based Mobility Model for Semi and Fully Autonomous Vehicles. SAE International Journal of Advances and Current Practices in Mobility, 2(2020-01-0747), 2640-2649.
Kassoumeh, S., Majcher, M., Ealy, J., Gorsich, D., Jayakumar, P., & Pandey, V. (2020). Balancing lifecycle sustainment cost with value of information during design phase. SAE International Journal of Advances and Current Practices in Mobility, 2(2020-01-0176), 2451-2458.
Slon, C., Pandey, V., Gorsich, D., & Jayakumar, P. (2020). Reconciling Simultaneous Evolution of Ground Vehicle Capabilities and Operator Preferences (No. 2020-01-0172). SAE Technical Paper.
Pandey, V., Slon, C., Mollan, C., Barthlow, D., Gorsich, D., & Jayakumar, P. (2020, August). Utility Function Derived Off-Road Vehicle Path Planning. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 84010, p. V11BT11A048). American Society of Mechanical Engineers.
Barthlow, D., Pandey, V., Gorsich, D., & Jayakumar, P. (2020, August). Off-Road Vehicle Path Planning Using Geodesics on a Multifactor Terrain Model. In International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (Vol. 84010, p. V11BT11A047). American Society of Mechanical Engineers.
Kassoumeh, S., & Pandey, V. (2018). A Decision Analytic Approach to Incorporating Value of Information in Autonomous Systems (No. 2018-01-0799). SAE Technical Paper.